Journal influence
Bookmark
Next issue
A method of deformation of functionally defined objects using graphics processing units
Abstract:The article discusses a method of modeling deformation of elastic functionally specified objects. Deformation and animation of three-dimensional objects are important functions, but require a large number of calculations. Modeling elastic dynamic objects is used in computer graphics, biomechanics and robotics applications. The aim of the work is to develop a method for modeling deformation of elastic objects on a graphics processor. The subject of the study is the Chebyshev and Jacobi methods and their use in projective dynamics. The theoretical significance of the work is in the combination of Chebyshev and Jacobi methods for solving problems of deformation and animation of surfaces, where the problem is a large number of calculations. Projective dynamics can be effectively accelerated using the Chebyshev method. The practical significance is in implementing the method on a GPU. The combination of the Chebyshev method and the Jacobi method for projective dynamics is optimally implemented on a GPU, since the calculations are well parallelized. As a result, we get a simple implementation that does not require additional libraries to solve this problem and has a small memory. The method does not need to refactorize the matrix with each system change, which is used in direct calculation, and requires large computational costs. When testing the proposed method, we used free form patches based on grids of basic triangles. Testing shows that this approach accelerates the projective dynamics by about one order of magnitude when the Jacobi solution is used at the global stage.
Аннотация:В статье рассмотрен метод моделирования деформации эластичных функционально заданных объектов. Деформация и анимация трехмерных объектов являются важными функциями, но требуют большого числа вычислений. Моделирование эластичных динамических объектов применяется в приложениях компьютерной графики, биомеханики и робототехники. Целью является разработка метода моделирования деформации эластичных объектов на графическом процессоре. Предметом исследования стали методы Чебышева и Якоби и их использование в проективной динамике. Теоретическая значимость разработки заключается в комбинировании данных методов для решения задач деформации и анимации поверхностей, где проблемой является большое число вычислений. Проективная динамика может быть эффективно ускорена с применением метода Чебышева. Практическая значимость состоит в реализации метода на графическом процессоре. Комбинация метода Чебышева и метода Якоби для проективной динамики оптимально реализуется на графическом процессоре, поскольку вычисления хорошо распараллеливаются. В результате получаем простую реализацию, которая не нуждается в дополнительных библиотеках для решения этой проблемы и имеет небольшую память. Метод не требует повторной факторизации матрицы при каждом изменении системы, используемой при прямом вычислении, но необходимы большие вычислительные затраты. При тестировании предлагаемого метода использованы патчи свободных форм на основе сеток базовых треугольников. Тестирование показывает, что такой подход ускоряет проективную динамику примерно на один порядок, когда на глобальном этапе используется решение Якоби.
| Authors: Vyatkin, S.I. (sivser@mail.ru) - Institute of Automation and Electrometry, Siberian Branch, Russian Academy of Sciences, Synthesizing Visualization Systems Laboratory (Senior Researcher), Novosibirsk, Russia, Ph.D, Dolgovesov, B.S. (bsd@iae.nsk.su ) - Institute of Automation and Electrometry, Siberian Branch, Russian Academy of Sciences, Synthesizing Visualization Systems Laboratory (Head of the Laboratory), Novosibirsk, Russia, Ph.D | |
| Keywords: animation, deformation, free-form patch, Jacobi method, Chebyshev method, projective dynamics, parallel computing, graphic processor |
|
| Page views: 1446 |
PDF version article |
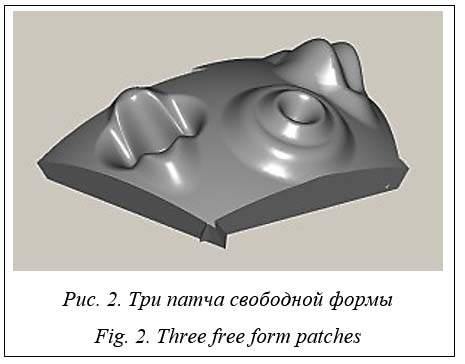
Численные методы для дифференциальных уравнений являются введением в фундаментальную область численного анализа и научных вычислений. Моделирование деформации объекта составляет фундаментальную задачу анимации. Для этого используются как явные, так и неявные модели пошагового времени. Применяются также методы оптимизации для эффективного динамического моделирования. Анимация, основанная на физике, является важным инструментом в компьютерной графике, но она требует больших вычислений. Моделирование в реальном времени необходимо в таких приложениях, как компьютерные игры и обучающие тренажеры (например, хирургические симуляторы). Деформация мягких тканей в реальном времени имеет большое значение для интерактивного хирургического моделирования. С этой целью разрабатываются алгоритмы моделирования деформации мягких тканей в реальном времени при силовом взаимодействии, которые имитируют механические деформации тканей. Подходы адаптированы как для изотропных, так и для анизотропных и гетерогенных материалов. Эти алгоритмы позволяют упрощать свойства тканевого материала, вязкоупругость тканей и их анатомию. Такие методы описывают принципы и компоненты хирургического тренажера, показывают процесс создания симулятора хирургии для конкретного пациента из набора медицинских изображений. В биомеханике решаются задачи оптимизации траектории для сочлененных тел. Используются дифференцируемые динамические модели, аппроксимации внутренних и внешних сил в виде плавной функции кинематического состояния сочлененного тела. Анизотропные материалы применяются в биомеханике, к ним относятся биологические ткани, такие как кожа и мышцы. Часто используемыми методами моделирования деформируемых объектов являются позиционная и проективная динамика [1, 2]. В статье [3] предлагается метод, основанный на физике, в режиме реального времени с динамическими деталями. Описано многослой- ное представление поверхностей, в результате имитируются правдоподобная динамика поверхности и взаимодействие поверхностей. В основе метода, описанного в [4], лежит разложение деформации на высокочастотную и низкочастотную составляющие. Используются ядра с узкой полосой пропускания, чтобы гарантировать объединение только прогнозов с аналогичными высокочастотными шаблонами. Веса смеси вычисляются с использованием ядра с узкой полосой пропускания, чтобы гарантировать объединение только прогнозов с аналогичными высокочастотными шаблонами. Различные вариации получаются путем вычисления подпространства деформации, которое удовлетворяет физическим ограничениям. Метод полностью дифференцируемый, поэтому может использоваться в области компьютерного зрения и алгоритмов обучения. В работе [5] предложен метод, основанный на деформируемых графических блоках и управлении их положением и поведением с помощью подхода, основанного на ограничениях. В методе используются неявные деформации. При восстановлении мягких объектов в различных деформационных состояниях результаты имеют неполную геометрию и текстуру из-за самозатенения. Для решения этой проблемы обычно используется априорный шаблон, но он требует сложного сканирования и сложной настройки. В статье [6] речь идет о структуре для реконструкции деформируемого мягкого объекта с полной геометрией и согласованной текстурой путем введения самогенерируемого шаблона с постепенным завершением. Также предлагается согласованное марковское случайное поле для ограничения моделей сетки в разных состояниях для создания согласованной текстуры и направления нежесткой деформации. Подход, изложенный в [7], автоматически точно передает детали от источника к цели, используя двухэтапный процесс. На этапе установления семантического соответствия строится плотное соответствие между источником и целью. Используется их семантическая информация в двумерных шаблонах. Сначала вычисляются начальные точки соответствия на парных двумерных шаблонах, используя их семантическую информацию. Эти маркерные точки действуют как ограничения и сопоставляются с соответствующими трехмерными моделями. Затем с помощью нежесткого итеративного алгоритма ближайшей точки устанавливается их соответствие для каждого треугольника. На этапе переноса деформации от источника к цели решается задача оптимизации. В работе [8] предлагается многосеточная схема для моделирования деформируемых объектов с высоким разрешением с интерактивной частотой кадров. Описывается специальный критерий проекции, основанный на сканировании пространственных координат с кусочно-постоянными весами, чтобы многосеточный метод Галеркина масштабировался для сеток с высоким разрешением. Использование пространственных координат сканирования позволяет снижать разрешение сеток, а кусочно-постоянные веса гарантируют достаточно разреженные линейные решения. С помощью проекционных матриц можно эффективно управлять многоуровневыми линейными системами. Метод может быть применен к различным схемам оптимизации, таким как метод Ньютона и проективная динамика. В отличие от позиционной динамики проективная точно решает неявное интегрирование по времени динамической системы, сформулированное в вариационной форме. Метод интерактивного моделирования нелинейных деформируемых объектов предложен в статье [9]. Его особенностью является интеграция моделирования деформаций и отбраковки столкновений. Применяется объемное приближение сложных трехмерных форм. Используется проективная динамика, которая хорошо отражает высокочастотные локальные деформации моделей с высоким разрешением. Нелинейные деформируемые эффекты обеспечиваются проекцией локальных ограничений. Работа [10] посвящена методу нелинейного деформируемого моделирования с быстрым непрерывным обнаружением столкновений и с надежным разрешением столкновений. В методе применяется преобразование медиальной оси для построения кинематического подпространства. Вместо проективной динамики используется классическая гиперупругость для реальных нелинейных материалов. В [11] представлен способ использования глубоких нейронных сетей для улучшения моделирования на основе физики. Интегрируется классическая механика Ла-Гранжа с автокодировщиком для ускорения упругого моделирования деформируемых тел. Используется пошаговая конечная разница в сочетании с обратным автоматическим различием. Эта стратегия позволяет пользоваться удобством и точностью конечной разности сложных шагов и экономить избыточные сетевые проходы. Обработка инъективной деформации описана в работе [12]. Метод решает сложные задачи обработки геометрии и анимации. В настоящей статье предлагается использовать методы Чебышева и Якоби в проективной динамике. Метод моделирования, основанный на ограничениях и известный как проективная динамика, становится менее эффективным, когда требуется больше итераций для уменьшения ошибок и артефактов быстро деформирующегося объекта. В отличие от метода сопряженного градиента метод Чебышева имеет простую рекуррентную форму и не использует внутреннее произведение. Однако существует проблема: при использовании метода Чебышева необходимо знать диапазон собственных значений, что на практике получить трудно. Если этот диапазон занижен или завышен, метод может медленно сходиться или даже расходиться. Эта проблема становится еще более сложной в силу того, что проективная динамика нелинейная и не существует матрицы для анализа собственных значений. В данной работе показано применение подхода Чебышева для ускорения проективной динамики, поскольку этот метод прост в реализации и совместим с ускорением графического процессора. При этом комбинация метода Якоби и подхода Чебышева позволяет получить дополнительные преимущества. Предлагается аппроксимация объектов трехмерных сцен патчами свободных форм на основе аналитических функций возмущения относительно базовых треугольников. Патчи свободных форм обладают достоинством сплайнового представления поверхностей – высокой степенью гладкости, но их главной отличительной чертой является сложность формы, что позволяет достичь компактного описания объектов высокого качества изображения. В отличие от известных патчей – бикубических, Безье, NURBS и т.д., которые ограничены порядком, предлагаемые патчи могут быть свободной формы, удовлетворять требованиям связности, гладкости и компактности. В данной работе представлен метод деформации трехмерных объектов на основе патчей свободных форм на графическом процессоре. Моделируются сетки, состоящие из патчей свободных форм. Определяется упругая энергия патча свободной формы. Для моделирования сеток на основе патчей свободных форм используется полярное разложение. Это необходимо для извлечения вращательной составляющей из градиента деформации с тензором растяжения. Вычисляются основные инварианты для получения симметричной матрицы. Время вычислений на графическом процессоре зависит от количества ограничений и вершин, участвующих в каждом ограничении, а не от общего количества вершин. Для каждого ограничения патча свободной формы требуются четыре вершины. Таким образом, представлен эффективный метод ускорения проективной динамики, основанный на методе Чебышева и решении Якоби. Метод требует небольших затрат памяти, может обрабатывать большие временные шаги и деформации и хорошо совместим с ускорением графического процессора. Описание метода
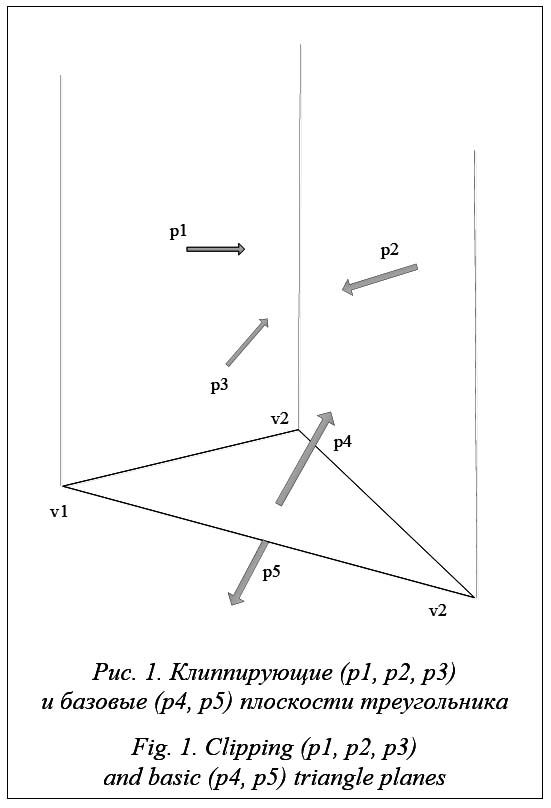
Треугольник (v1, v2, v3) в функциональном пространстве образуется пересечением пяти плоскостей: трех клиппирующих (p1, p2, p3), которые перпендикулярны базовым плоскостям треугольника с нормалями, ориентированными внутрь треугольника, и двух базовых (p4, p5) (рис. 1) с противоположно направленными нормалями. Патч свободной формы – это компози- ция базового треугольника и возмущений
где Q(x, y, z) – возмущающая квадрика. Метод Якоби – один из наиболее простых методов приведения системы матрицы к виду, удобному для итерации [14]. Из первого уравнения матрицы выражается неизвестное Для построения итеративной процедуры метода Якоби необходимо предварительно преобразовать систему уравнений Процедуру нахождения решения представим как
где На каждой итерации хранятся старый и новый векторы приближений. Для остановки и проверки точности, а также завершения вычислений на основе вычисления расстояния между соседними элементами в последовательности итераций можно воспользоваться евклидовой метрикой. В этом случае условие завершения вычислений будет следующим:
По сути это относительная погрешность, учитывающая все решения, а именно среднеквадратичные отклонения, чтобы исключить влияние знака: при сложении абсолютных разниц создавались бы иллюзии достижения необходимой точности и маленького разброса. Если бы одна разница была большой со знаком плюс, а другая примерно такой же большой, но со знаком минус, они просто аннигилировали бы друг друга и дали ложный результат. Именно поэтому используются квадраты отклонений, а потом уже накладывается корень. Чтобы считать евклидову метрику на каждой итерации, необходимо сохранять вектор решения на предыдущей итерации. То есть, считая новый набор корней на новой итерации, необходимо сохранять старый набор корней на предыдущей итерации, чтобы потом было с чем сравнивать. На практике хорошо ограничивать выполнение цикла каким-либо предельным количеством итераций, например, от 100 до 500. Для хорошей сходимости этого достаточно, поскольку при схождении метода система достигает нужной точности примерно за 20–50 итераций (чаще всего при точности e = 0.0001). Если решение расходится, то вводится ограничение по числу итераций, чтобы не войти в бесконечный цикл. Следует отметить, что скорость сходимости итерационного процесса выше для матриц, у которых элементы главной диагонали велики по сравнению с внедиагональными элементами. В связи с этим перед началом численного решения задачи желательно преобразовать систему уравнений так, чтобы преобладали диагональные элементы. Порядок решения систем линейных алгебраических уравнений методом Якоби следующий: – приведение системы уравнений к виду, в котором на каждой строчке выражено какое-либо неизвестное значение системы; – произвольный выбор нулевого решения, в качестве которого можно взять вектор-столбец свободных членов; – подстановка произвольного нулевого решения в систему уравнений, полученную вначале; – выполнение дополнительных итераций, для каждой из которых используется решение, полученное на предыдущем этапе. Метод Чебышева. Оптимальную последовательность можно вычислить из векторной последовательности, полученной в процессе разделения посредством общих линейных комбинаций [15]:
Начальная ошибка умножается на матричный полином с целью ее уменьшения. Если матрица имеет только действительные собственные значения в интервале, многочлен с наименьшей оценкой спектрального радиуса является сдвинутым многочленом Чебышева. Для снижения вычислений и памяти вместо вычисления yk (2) используется уравнение
где Ck(x) – многочлен Чебышева; r – спектральный радиус. Функцию обновления запишем в следующем виде:
где Тогда часть функции обновления Чебышева является одним итерационным шагом решения Якоби, описанным в уравнении (1). Метод похож на взвешенный метод Якоби, но он сходится гораздо быстрее, потому что метод Чебышева изменяет коэффициент на каждой итерации. Преимуществом метода Чебышева является его простота. Метод имеет короткую рекур- рентную форму и не использует внутренние произведения, поэтому он подходит для параллельных вычислений на графическом процессоре. Однако метод Чебышева требует одного спектрального радиуса, который оценивается численно. Если известен узкий диапазон собственных значений, можно настроить метод для более быстрой сходимости. В проективной динамике важным является решение глобального шага. Если каждый временной шаг содержит небольшое количество итераций, можно решать задачу проективной динамики в реальном времени. Однако нескольких итераций недостаточно для локального шага, когда объект подвергается большой деформации. Рассмотрим трехмерную динамическую систему с N вершинами. Движение от t-го момента времени до момента времени t + 1 путем неявного интегрирования по времени бу- дет:
где Если
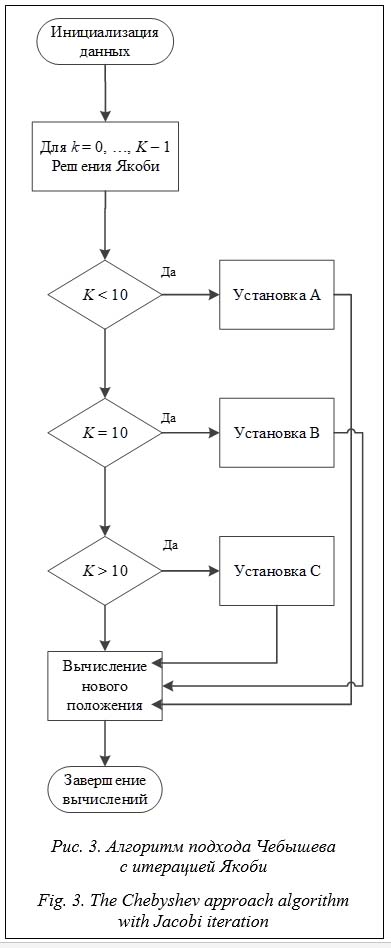
Используем одну итерацию Якоби на каждом глобальном шаге проективной динамики. В результате каждая итерация проективной динамики будет содержать локальный шаг и итерацию Якоби. Результат локального шага стабилизируется в течение нескольких итераций, поэтому линейная система на глобальном шаге после этого не меняется. Сходимость проективной динамики аналогична сходимости метода Якоби, решающего линейную систему за один глобальный шаг. Предлагается использовать подход Чебышева для проективной динамики, который заменяет одну итерацию Якоби с помощью одной итерации проективной динамики. На графическом процессоре комбинация метода Якоби и Чебышева эффективна, поскольку она естественно совместима с параллельными вычислениями. Рассмотрим r (спектральный радиус) как константу для каждой задачи моделирования. Вычислим r с помощью предварительного моделирования в два этапа. Пусть K – общее число итераций проективной динамики. Инициализируем спектральный радиус r:
Определяем ошибку:
Также метод мощности оценивает спектральный радиус r для стандартного итерационного метода. Радиус является постоянным на протяжении всего процесса моделирования и зависит от общего числа итераций K. Используем ограничения для моделирования сеток из патчей свободных форм и определим упругую энергию сетки:
где st – жесткость; v – объем до деформации; G – градиент деформации; R – вращательная составляющая G. Для моделирования сеток из патчей свободных форм используем полярное разложение, чтобы извлечь вращательную составляющую из градиента деформации G : G = GT. Вычисляем три основных инварианта тензора растяжения T из градиента деформации GTG, а затем используем их для получения тензора растяжения T.
Начальные условия функции обновления (2) следующие:
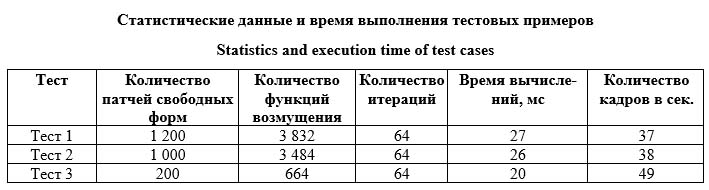
Таким образом, осуществляется неявное интегрирование по времени динамической системы в вариационной форме. При этом полу- чаются лучшие физические показатели. Сходящийся результат совпадает с точным решением динамической системы при неявном интегрировании Эйлера, которое не зависит от тесселя- ции сетки и количества итераций. Линейная система на глобальном шаге имеет постоянную матрицу. Критерий сходимости не ставит под угрозу надежность проективной динамики для сеток из патчей свободных форм даже в случае, когда сетка низкого качества или находится под большим напряжением. В итоге можно использовать ограничение деформации, чтобы избежать расхождения в этих случаях. Результаты Производительность метода протестирована на графическом процессоре. Результаты тестов приведены в таблице и проиллюстрированы соответствующими рисунками (см. http:// www.swsys.ru/uploaded/image/2023-3/2023-3-dop/ 7.jpg). Тесты графического процессора выполняются на карте NVIDIA GeForce GTX 470. Время вычислений зависит от количества ограничений и вершин, участвующих в каждом ограничении, а не от их общего числа. Для каждого ограничения патча свободной формы требуются четыре вершины. Локальный шаг, обеспечивающий соблюдение ограничений, потребляет от 10 до 40 % затрат на динамику. В графическом процессоре не используются атомарные операции для передачи результатов обратно в вершины на локальном шаге. Результаты для каждой вершины получаются на глобальном шаге, стоимость которого зависит от доступа к памяти.
Поведение сходимости метода Якоби без ускорения Чебышева показано на рисунке (см. http://www.swsys.ru/uploaded/image/2023-3/2023- 3-dop/10.jpg). Метод Якоби решает линейную систему за один глобальный шаг. По оси ординат отражена ошибка, которая представляет со- бой величину погрешности линейной системы, по оси абсцисс – количество итераций. Показаны три графика для разной степени жесткости. Диаграмма точности на рисунке (см. http://www.swsys.ru/uploaded/image/2023-3/2023-3-dop/11.jpg) показывает производительность комбинированного метода Чебышева и Якоби по сравнению с другими на примере рисунка (см. http://www.swsys.ru/uploaded/image/2023-3/2023-3-dop/9.jpg). Время по шкале абсцисс измеряется в миллисекундах. Заключение В работе представлен метод деформации трехмерных объектов на основе патчей свободных форм. Показано, что сходимость проективной динамики аналогична сходимости итерационного метода. В результате проективная динамика может быть эффективно ускорена с применением метода Чебышева. Комбинация методов Якоби и Чебышева дополнительно позволяет эффективно обрабатывать позиционные и контактные ограничения на каждой итерации. Этот подход требует небольших затрат памяти и может обрабатывать большие временные шаги и деформации. Список литературы 1. Zhao J., Chen C., Feng Y., Wang Z. High effective simulation of solid-fluid coupling for complex scenes. J. of Comp.-Aided Design and Comp. Graphics, 2019, vol. 31, no. 8, art. 1358. doi: 10.3724/SP.J.1089.2019.17404. 2. Sommer A., Schwanecke U., Schoemer E. Chebyshev’s method on projective fluids. J. of WSCG, 2020, vol. 28, no. 1-2, pp. 132–136. doi: 10.24132/JWSCG.2020.28.16. 3. Tao Y., Zheng Z., Zhong Y., Zhao J. SimulCap: Single-view human performance capture with cloth simulation. Proc. IEEE/CVF Conf. on CVPR, 2019, pp. 5499–5509. doi: 10.1109/CVPR.2019.00565. 4. Patel C., Liao Z., Pons-Moll G. TailorNet: Predicting clothing in 3D as a function of human pose, shape and garment style. Proc. IEEE/CVF Conf. on CVPR, 2020, pp. 7363–7373. doi: 10.1109/CVPR42600.2020.00739. 5. Niyazov A., Mellado N., Barthe L., Serrano M. Dynamic decals: Pervasive freeform interfaces using constrained deformable graphical elements. Proc. ACM on Human-Comput. Interaction, 2021, vol. 5, no. ISS, pp. 1–27. doi: 10.1145/3488538. 6. Li J., Liu X., Deng H., Wang T. Reconstruction of colored soft deformable objects based on self-generated template. Comput.-Aided Design, 2021, vol. 143, art. 103124. doi: 10.1016/j.cad.2021.103124. 7. Wang L., Li H., Xiao Q., Yao X. Automatic pose and wrinkle transfer for aesthetic garment display. Comput. Aided Geometric Design, 2021, vol. 89, art. 102020. doi: 10.1016/j.cagd.2021.102020. 8. Xian Z., Tong X., Liu T. A scalable galerkin multigrid method for real-time simulation of deformable objects. ACM Transactions on Graphics, 2019, vol. 38, no. 6, pp. 1–13. doi: 10.1145/3355089.3356486. 9. Lan L., Luo R., Fratarcangeli M., Xu W. Medial elastics: Efficient and collision-ready deformation via medial axis transform. ACM Transactions on Graphics, 2020, vol. 39, no. 3, pp. 1–17. doi: 10.1145/3384515. 10. Lan L., Yang Y., Kaufman D., Yao J. Medial IPC: Accelerated incremental potential contact with medial elastics. ACM Transactions on Graphics, 2021, vol. 40, no. 4, pp. 1–16. doi: 10.1145/3476576.3476741. 11. Shen S., Yang Y., Shao T., Wang H. High-order differentiable autoencoder for nonlinear model reduction. ACM Transactions on Graphics, 2021, vol. 40, no. 4, pp. 1–15. doi: 10.1145/3476576.3476620. 12. Fang Y., Li M., Jiang C., Kaufman D.M. Guaranteed globally injective 3D deformation processing. ACM Transactions on Graphics, 2021, vol. 40, no. 4, pp. 1–13. doi: 10.1145/3450626.3459757. 13. Вяткин С.И., Долговесов Б.С. Моделирование деформации эластичных объектов с использованием функций возмущения // Программные продукты и системы. 2022. Т. 35. № 4. С. 748–757. doi: 10.15827/0236-235X.140.748-757. 14. Denton P.B., Parke S.J., Tao T., Zhang X. Eigenvectors from eigenvalues: A survey of a basic identity in linear algebra. Bull. Amer. Math. Soc., 2022, vol. 59, no. 1, pp. 31–58. doi: 10.1090/bull/1722. 15. Liu C., Han X., Li J. The Chebyshev accelerating method for progressive iterative approximation. Communications in Information and Systems, 2017, vol. 17, no. 1, pp. 25–43. 16. Ascher U.M., Larionov E., Sheen S.H., Pai D.K. Simulating deformable objects for computer animation: A numerical perspective. J. of Computational Dynamics, 2021, vol. 9, no. 2, pp. 47–68. doi: 10.3934/jcd.2021021. Reference List 1. Zhao, J., Chen, C., Feng, Y., Wang, Z. (2019) ‘High effective simulation of solid-fluid coupling for complex scenes’, J. of Comp.-Aided Design and Comp. Graphics, 31(8), art. 1358. doi: 10.3724/SP.J.1089.2019.17404. 2. Sommer, A., Schwanecke, U., Schoemer, E. (2020) ‘Chebyshev’s method on projective fluids’, J. of WSCG, 28(1-2), pp. 132–136. doi: 10.24132/JWSCG.2020.28.16. 3. Tao, Y., Zheng, Z., Zhong, Y., Zhao, J. (2019) ‘SimulCap: Single-view human performance capture with cloth simulation’, Proc. IEEE/CVF Conf. on CVPR, pp. 5499–5509. doi: 10.1109/CVPR.2019.00565. 4. Patel, C., Liao, Z., Pons-Moll, G. (2020) ‘TailorNet: Predicting clothing in 3D as a function of human pose, shape and garment style’, Proc. IEEE/CVF Conf. on CVPR, pp. 7363–7373. doi: 10.1109/CVPR42600.2020.00739. 5. Niyazov, A., Mellado, N., Barthe, L., Serrano, M. (2021) ‘Dynamic decals: Pervasive freeform interfaces using constrained deformable graphical elements’, Proc. ACM on Human-Comput. Interaction, 5(ISS), pp. 1–27. doi: 10.1145/3488538. 6. Li, J., Liu, X., Deng, H., Wang, T. (2021) ‘Reconstruction of colored soft deformable objects based on selfgenerated template’, Comput.-Aided Design, 143, art. 103124. doi: 10.1016/j.cad.2021.103124. 7. Wang, L., Li, H., Xiao, Q., Yao, X. (2021) ‘Automatic pose and wrinkle transfer for aesthetic garment display’, Comput. Aided Geometric Design, 89, art. 102020. doi: 10.1016/j.cagd.2021.102020. 8. Xian, Z., Tong, X., Liu, T. (2019) ‘A scalable galerkin multigrid method for real-time simulation of deformable objects’, ACM Transactions on Graphics, 38(6), pp. 1–13. doi: 10.1145/3355089.3356486. 9. Lan, L., Luo, R., Fratarcangeli, M., Xu, W. (2020) ‘Medial elastics: Efficient and collision-ready deformation via medial axis transform’, ACM Transactions on Graphics, 39(3), pp. 1–17. doi: 10.1145/3384515. 10. Lan, L., Yang, Y., Kaufman, D., Yao, J. (2021) ‘Medial IPC: Accelerated incremental potential contact with medial elastics’, ACM Transactions on Graphics, 40(4), pp. 1–16. doi: 10.1145/3476576.3476741. 11. Shen, S., Yang, Y., Shao, T., Wang, H. (2021) ‘High-order differentiable autoencoder for nonlinear model reduction’, ACM Transactions on Graphics, 40(4), pp. 1–15. doi: 10.1145/3476576.3476620. 12. Fang, Y., Li, M., Jiang, C., Kaufman, D.M. (2021) ‘Guaranteed globally injective 3D deformation processing’, ACM Transactions on Graphics, 40(4), pp. 1–13. doi: 10.1145/3450626.3459757. 13. Vyatkin, S.I., Dolgovesov, B.S. (2022) ‘Modelling of deformation of elastic objects using perturbation functions’, Software & Systems, 35(4), pp. 748–757 (in Russ.). doi: 10.15827/0236-235X.140.748-757. 14. Denton, P.B., Parke, S.J., Tao, T., Zhang, X. (2022) ‘Eigenvectors from eigenvalues: A survey of a basic identity in linear algebra’, Bull. Amer. Math. Soc., 59(1), pp. 31–58. doi: 10.1090/bull/1722. 15. Liu, C., Han, X., Li, J. (2017) ‘The Chebyshev accelerating method for progressive iterative approximation’, Communications in Information and Systems, 17(1), pp. 25–43. 16. Ascher, U.M., Larionov, E., Sheen, S.H., Pai, D.K. (2021) ‘Simulating deformable objects for computer animation: A numerical perspective’, J. of Computational Dynamics, 9(2), pp. 47–68. doi: 10.3934/jcd.2021021. |

| Permanent link: http://swsys.ru/index.php?page=article&id=5015&lang=&lang=en&like=1 |
Print version |
| The article was published in issue no. № 3, 2023 [ pp. 414-422 ] |
Perhaps, you might be interested in the following articles of similar topics:
- Параллельные вычисления при моделировании процесса растворения на микроуровне
- Исследование эффективности библиотеки MaLLBa на примере задач максимальной выполнимости
- Реализация системы частиц в реальном времени на GPU
- Программный комплекс для решения задач теории потенциала методом граничных элементов
- Построение адаптивной регулярной сетки трехмерной сцены в реальном режиме времени
Back to the list of articles