Авторитетность издания

Добавить в закладки
Следующий номер на сайте


Метод испытания радиолокационных станций с использованием беспилотного летательного аппарата и бортового оборудования
Аннотация:Описанный в статье метод испытания радиолокационных станций с использованием беспилотного летательного аппарата и бортового оборудования разработан для управления движением беспилотного летательного аппарата (носителя) и сигналом с выхода бортового генератора таким образом, чтобы излучаемый сигнал соответствовал реальным условиям эксплуатации радиолокатора. Тестирование радиолокатора выполняется так же, как при облетном методе, но без использования реальных целей. Цифровое представление тестового сигнала рассчитывается бортовым вычислителем, и с помощью генератора и антенны излучается радиосигнал, соответствующий текущему режиму работы станции. Изменяя координаты и структуру излучаемого сигнала, можно контролировать угловые координаты, дальность и количество целей для испытываемого радиолокатора. Предложенным методом можно проводить тестирование для определения различных характеристик локаторов. В работе приводятся результаты моделирования по определению характеристик программной модели локатора. Для моделирования также используется программная модель носителя. Моделирование заключается в том, что при изменении модельного времени изменяются координаты носителя и моделируемых целей, а программная модель локатора выполняет процедуру обнаружения в соответствии с заданными характеристиками. По окончании моделирования координаты носителя и моделируемых целей сопоставляются с координатами обнаруженных целей. По результатам сопоставления можно определить функциональные характеристики локатора. Предлагаемый метод может быть полезен при проведении работ по подготовке к натурным испытаниям, а также для оценки характеристик, которые оценить традиционными методами затруднительно, например, при оценке разрешающей способности по дальности, предполагающей использование двух воздушных средств, расстояние между которыми должно уменьшаться, что потенциально увеличивает риск столкновения.
Abstract:The paper proposes the modernization of the laboratory test method using an unmanned aerial vehicle, which houses a programmable generator with an on-board computer and other necessary auxiliary equipment. Radar testing is performed as in the flyby method but without using real targets. The es-sence of the method is to control the carrier’s movement and the signal from the onboard generator output in such a way that the emitted signal corresponds to the actual radar operating conditions. The on-board computer calculates the test signal digital representation; a radio signal corresponding to the current operating mode of the station is emitted using a generator and an antenna. It is possible to con-trol the angular coordinates, range and number of targets for the tested radar by changing the coordi-nates and structure of the emitted signal. The proposed method can be used to test various characteristics of radars. The paper presents the results of modeling from determining the locator software model characteristics. The carrier’s software model is also used for modeling. Modeling consists in the fact that when the model time changes, the coordinates of the carrier and the simulated targets change; the locator software model performs the de-tection procedure according to the specified characteristics. At the end of the simulation, the coordi-nates of the carrier and the simulated targets are compared with the detected target coordinates. Based on the comparison results, it is possible to determine the functional characteristics of the locator. The proposed method can be useful in preparing for full-scale tests, as well as for evaluating char-acteristics that are difficult to evaluate by traditional methods, for example, when evaluating the range resolution, which involves the use of two aircrafts, the distance between which should decrease, which potentially increases the risk of collision.
| Авторы: Калабин А.Л. (alex.ka.86@gmail.com) - Тверской государственный технический университет, г. Тверь, Россия, доктор физико-математических наук, Морозов А.К. (yerdnavozorom@gmail.com) - Тверской государственный технический университет (аспирант), Тверь, Россия | |
| Ключевые слова: программная модель, компьютерное моделирование, имитирование радиолокационной цели, беспилотный летательный аппарат, тестирование радиолокатора |
|
| Keywords: software model, computer modeling, imitation of a radar target, unmanned aerial vehicle, radar testing |
|
| Количество просмотров: 1886 |
Статья в формате PDF |
Для испытания и подтверждения характеристик радиолокаторов часто используются испытательные стенды [1–3]. Они позволяют при приемлемых затратах ресурсов получать необходимую информацию об изделии [4, 5]. Например, при испытании датчиков автомобилей используются тестовые камеры с имитаторами, взаимодействующими с оборудованием автомобиля [2]. Требуемое воздействие на датчики определяется моделируемой дорожной ситуацией. Задача стенда – сформировать условия функционирования, приближенные к реальным для испытываемого изделия, путем генерации тестовых сигналов. Подобным образом можно проводить испытания для наземных радиолокационных станций (РЛС). При испытании отдельно только приемников РЛС тестовые сигналы формиру- ются на основе математической модели, учи- тывающей основные факторы [6]. Но есть факторы, для учета которых требуются значительные вычислительные мощности, например, отражения от земли, особенности рельефа, влияние погодных условий, электромагнитная обстановка в точке развертывания и другие. Поэтому для испытания наземных импульсных РЛС аппаратуру имитирования сигнала целей предлагается размещать на беспилотном летательном аппарате (БПЛА). В таком случае сигнал, излучаемый с борта носителя, принимается антенной РЛС с влиянием всех присутствующих факторов.
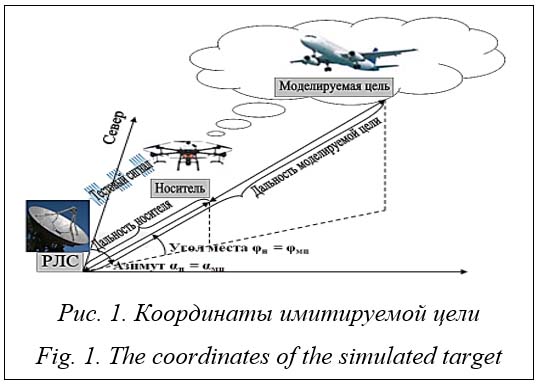
Угловые координаты моделируемой цели определяются положением носителя: αмц = αн, φмц = φн, (1) где αмц – азимут моделируемой цели; φмц – угол места моделируемой цели; αн – азимут носителя; φн – угол места носителя. Дальность имитируемой цели складывается из расстояния проведения измерений и дальности, которую добавляет бортовое оборудование. Применительно к ситуации, представленной на рисунке 1, дальность имитируемой цели рассчитывается следующим образом [7]:
где rмц – дальность моделируемой цели; rмцmin – минимально возможная дальность моделируемой цели; tзг – время задержки, формируемое бортовым генератором; c – скорость света. Минимально возможная дальность моделируемой цели складывается из текущего расстояния, на котором находится носитель с бортовым оборудованием, а также паузы, которую вносят вычислитель и схема синхронизации бортового оборудования с излучателем РЛС, и рассчитывается по формуле
где rн – текущее удаление носителя от РЛС; tп – пауза, вносимая запаздыванием сигнала синхронизации и работой вычислителя. Таким образом, из выражений (2, 3) следует, что контроль дальности имитируемой цели можно осуществлять, добавляя время задержки для импульса, излучаемого бортовым генератором:
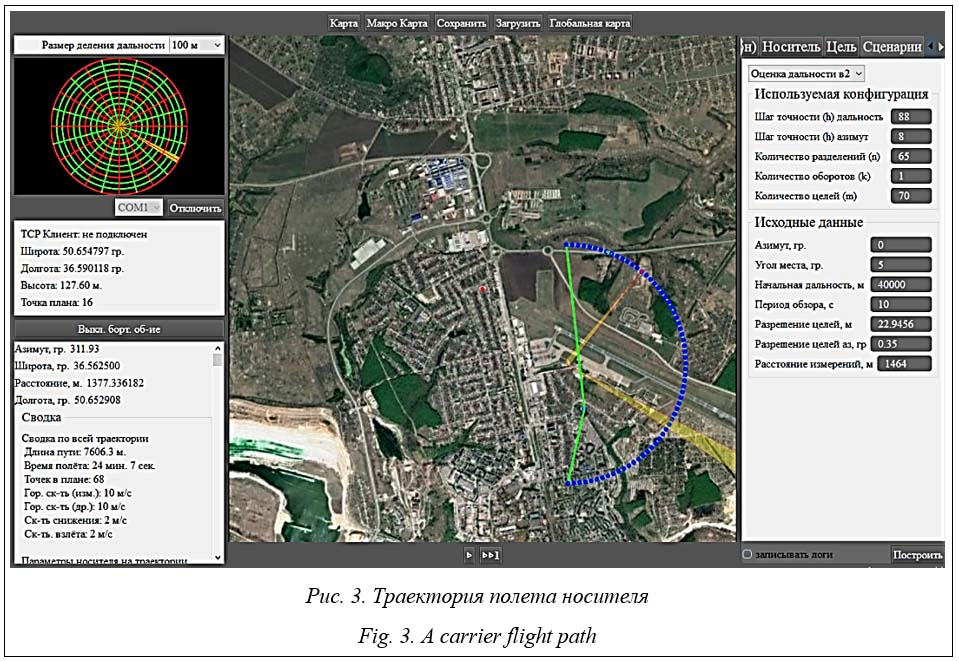
В процессе испытаний носитель останавливается в заданной точке траектории и ждет прохождения луча РЛС на этих координатах, затем перемещается в следующее положение и опять ожидает. Таким способом носитель переме- щается во все указанные точки траектории. Во время полета бортовое оборудование излучает сигнал, количество импульсов в котором соответствует требуемому количеству моделируемых целей, а время задержки каждого импульса требуемой дальности. По окончании испытаний на РЛС формируется файл с указанием координат обнаруженных целей, а оборудование носителя фиксирует в файл ожидаемые координаты моделируемых целей. Далее эти два файла сопоставляются и определяется адекватность функционирования РЛС. Было выполнено компьютерное моделирование с использованием разработанного приложения для планирования испытаний описываемым методом.
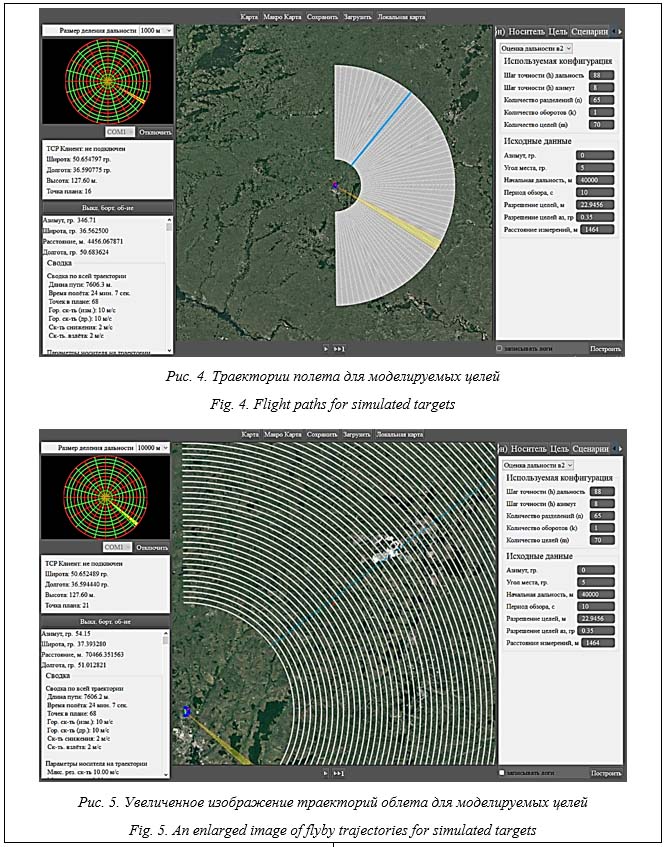
На рисунке 4 изображены траектории моделируемых целей. Они, как и траектория носителя, являются дугами окружности, но с гораздо большим радиусом – от 40 до 180 км с шагом 2 км. Дальность целей во время испытаний будет определяться временем задержки излучаемых импульсов, а в приложении отображаются ожидаемые траектории целей.
Ожидается, что при использовании БПЛА с программируемым генератором и приведенными траекториями облета можно измерить некоторые функциональные характеристики РЛС. Например, максимальную дальность обнаружения, разрешающую способность по дальности, ошибку определения азимута, угла места, дальности. Для оценки возможностей метода было выполнено моделирование для программной модели РЛС. Цель его – определение характеристик программной модели РЛС предлагаемым методом. В таблице приведены результаты моделирования. Характеристики программной модели РЛС, полученные после обработки данных моделирования Characteristics of the radar software model obtained after processing simulation data
По полученным результатам можно сделать вывод, что измеренные показатели достаточно близки к заданным. Это свидетельствует о це- лесообразности применения указанного метода для определения характеристик РЛС. Возможно измерение и других характеристик, например, разрешающая способность по дальности, по угловым координатам, точность определения координат. Литература 1. Chan C.C., Kurnia F.G., Al-Hournani A. et al. Open-source and low-cost test bed for automated 5G channel measurement in mmWave band. J. Infrared Milli Terahz Waves, 2019, vol. 40, no. 5, pp. 535–556. DOI: 10.1007/S10762-019-00587-Z. 2. Gadringer M.E., Schreiber H., Gruber A. et al. Virtual reality for automotive radars. e & i Elektrotechnik und Informationstechnik, 2018, vol. 135, no. 4-5, pp. 335–343. DOI: 10.1007/s00502-018-0620-9. 3. Vorderderfler M., Gadringer M.E., Schreiber H. et al. Frequency dividers in radar target stimulator applications. e & i Elektrotechnik und Informationstechnik, 2018, vol. 135, no. 4-5, pp. 344–351. DOI: 10.1007/s00502-018-0626-3. 4. Jarrar A., Balouki Y. Formal modeling of a complex adaptive air traffic control system. Complex Adaptive Systems Modeling, 2018, vol. 6, no. 1, art. 6. DOI: 10.1186/s40294-018-0056-4. 5. Merkulov V.I., Sadovskii P.A. Estimation of the range and its derivatives in an active two-position radar system. J. of Communications Technology and Electronics, 2018, vol. 63, no. 4, pp. 346–353. DOI: 10.1134/S1064226918040083. 6. Costanzo S., Spadafora F., Borgia A., Moreno O.H., Costanzo A., Di Massa G. High resolution software defined radar system for target detection. In: Advances in Intelligent Systems and Computing, 2013, vol. 206, pp. 997–1005. DOI: 10.1007/978-3-642-36981-0_94. 7. Сколник М. Справочник по радиолокации. Ч. 1. М.: Техносфера, 2014. 672 с. References
| |||||||||||||||||||||||

| Постоянный адрес статьи: http://swsys.ru/index.php?page=article&id=4924&lang=&lang=&like=1 |
Версия для печати |
| Статья опубликована в выпуске журнала № 3 за 2022 год. [ на стр. 438-443 ] |
Возможно, Вас заинтересуют следующие статьи схожих тематик:
- Компьютерное моделирование эксперимента по имитации наличия целей для радиолокационной станции
- Модель ускорителя идеальных частиц
- Концепция математического и компьютерного моделирования тепловых процессов в электронных системах
- Компьютерное моделирование для интеллектуальной оценки динамического взаимодействия твердых тел
- Программно-аппаратный комплекс для исследования, проектирования и управления процессом переработки пластических масс
Назад, к списку статей