Авторитетность издания

Добавить в закладки
Следующий номер на сайте


iLabit OmViSys: фотореалистичный симулятор на базе всенаправленной камеры и структурированного света
Аннотация:В последнее время виртуальное обучение привлекает большое внимание со стороны сообщества компьютерного зрения. Это обусловлено достижениями в области обучения нейронных сетей, которые подкрепляются спросом на обширные обучающие данные. Существует множество доступных виртуальных сред моделирования, но большинство из них базируются на стандартной камере и ограничены в плане измерительных сенсоров, расположенных на мобильном роботе. В данной работе для облегчения сбора данных в системах, которые ранее не были интегрированы в существующие виртуальные среды, предлагается фотореалистичный симулятор iLabit OmViSys, включающий в свой состав всенаправленную камеру, а также источник структурированного света. Всенаправленная камера и структурированный свет имеют отличительные преимущества по сравнению с другими системами компьютерного зрения. Камера обеспечивает широкий угол обзора за счет одного единственного снимка. Кроме того, легко обнаружить источник лазерного света и извлечь информацию из данного изображения для дальнейшей обработки. Разработанный с использованием Unity симулятор iLabit OmViSys интегрирует мобильных роботов, элементы внутренней среды, позволяет генерировать синтетические фотореалистичные наборы данных, а также поддерживает коммуникацию со сторонними программами на базе Transmission Control Protocol (TCP). Симулятор включает в свой состав три основных экрана, позволяющих генерировать данные для внутренней калибровки камеры, проводить эксперименты, а также измерения. Отличительной особенностью iLabit OmViSys также является его универсальность в плане поддержки таких операционных систем, как Windows, macOS и Linux.
Abstract:According to recent advances in neural network learning, which are supported by the demand for large training data, virtual learning has recently attracted a lot of attention from the computer vision commu-nity. Today, there are many available virtual simulation environments, but most of them are based on a standard camera and are limited to measure sensors that are on the mobile robot. To facilitate data collection in systems that were not previously integrated into existing virtual envi-ronments, this paper presents a photorealistic simulator "iLabit OmViSys", which includes an Omnidi-rectional camera, and a structured light source. An Omnidirectional camera and structured light have their own distinctive advantages compared to other computer vision systems. The Omnidirectional camera provides a wide viewing angle with a single shot. In addition, the laser light source is easy to detect and extract its information from this image for further processing. Developed using Unity, the iLabit OmViSys simulator also integrates mobile robots, elements of the internal environment, allows you to generate synthetic photorealistic datasets, and supports communi-cation with third-party programs based on the Transmission Control Protocol (TCP). iLabit OmViSys includes three primary screens that allow one to generate data for internal camera calibration, carried out experiments, and take measurements. A distinctive feature of the simulator is also its versatility, in terms of support for such operating systems as Windows, macOS, and Linux.
| Авторы: Холодилин И.Ю. (kholodilin.ivan@yandex.ru ) - Южно-Уральский государственный университет (национальный исследовательский университет) (аспирант), Челябинск, Россия | |
| Ключевые слова: семантические данные, структурированный свет, всенаправленная камера, unity, симулятор |
|
| Keywords: semantic data, structured light, omnidirectional camera, unity, simulator |
|
| Количество просмотров: 2955 |
Статья в формате PDF Выпуск в формате PDF (7.81Мб) |
В последние годы исследования в области робототехники претерпели значительные изменения. Во-первых, все больший научный интерес вызывают всенаправленные камеры, которые обеспечивают 360-градусный обзор и, следовательно, могут обрабатывать большой объем данных, полученных из окружающей среды. Мобильные роботы, оборудованные такими камерами, способны взаимодействовать с визуальными ориентирами гораздо дольше, чем в случае с обычными камерами, повышая тем самым скорость и эффективность задач, выполняемых роботом. Во-вторых, научный интерес в большей степени проявляется к разработке автономных мобильных роботов [1–3]. При разработке алгоритмов управления необходимо избегать ошибок, которые могут привести к экономическим и человеческим потерям. В связи с этим актуальны снижение времени на тестирование программ, а также прогнозирование риска возникновения аварийных ситуаций. В силу названных проблем возникает необ-ходимость поиска среды, в которой можно было бы испытать работоспособность роботов, прежде чем они перейдут к выполнению определенной задачи в реальных условиях. В ее качестве может выступать виртуальная среда, в которой моделируются события, встречающиеся в реальных условиях. В виртуальной среде становится возможным более глубокий анализ стабильности и надежности проектируемых систем, позволяя таким образом тестировать алгоритмы управления и испытывать различные аварийные режимы, определяя при этом работоспособность системы в целом. Фотореализм современных игровых платформ, например Unity, открывает новый путь для разработки и оценки методов решения разнообразных задач компьютерного зрения, которые в конечном итоге будут подобны реальному миру. Данный подход позволяет разрабатывать новые и реалистичные симуляторы. Также следует отметить, что эти симуляторы приближаются не только к фотореализму, но и к реалистичному физическому моделированию, которое поддерживается в Unity, тем самым сокращая разрыв между моделируемыми приложениями и реальным миром. В статье представлен полнофункциональный настраиваемый симулятор, построенный на базе Unity. Это первый полноценный симулятор, включающий в свой состав всенаправленную камеру. Он обеспечивает доступ как к визуальным данным, полученным с камер (RGB-изображения), установленных в моделируемой среде, так и к семантической информации, которая может быть использована для обучения нейронных сетей. Например, симулятор предусматривает такие режимы, как карта глубины и семантическая сегментация. Обзор литературы Виртуальная среда изначально находила свое применение в компьютерных играх и консолях, в последнее время виртуальные среды стали также использоваться для моделирования различных приложений в области робототехники. Исследования в данной области свидетельствуют о положительном влиянии симуляторов и на образовательный процесс [4]. Подробный обзор всех симуляторов из области робототехники выходит за рамки данной статьи, поэтому назовем несколько недавних работ, наиболее близких к рассматриваемой. Для получения фотореалистичных изображений, сформированных при помощи всенаправленной камеры, в ряде работ рассматривался Blender [5, 6]. Это набор инструментов с открытым исходным кодом для 3D-моделирования, рендеринга и анимации. Однако данная платформа не подходит для задач программирования и коммуникации с другими программами, что ограничивает ее использование в определенных случаях. Большую гибкость в разработке приложений способны обеспечить такие игровые платформы, как Unity, UNIGINE, CRYENGINE и Unreal Engine 4. Воспользовавшись преимуществами современных игровых платформ, P. Bourke [7] выпустил общедоступное расширение, имитирующее всенаправленную камеру с настраиваемым полем зрения (180o, 210o, 240o), камера была смоделирована в Unity. За счет этого пользователи, знакомые с платформой Unity, способны захватывать всенаправленные изображения своих 3D-сцен. Также следует отметить, что процесс разработки новой сцены занимает много времени и требует определенных навыков работы в Unity. Таким образом, в данной статье предлагается симулятор, ориентированный на изучение всенаправленной системы компьютерного зрения в условиях закрытых помещений. Он не требует особых навыков в программировании и подобно видеоигре может быть просто установлен на такие операционные системы, как Windows, macOS и Linux. В отличие от Blender представленный симулятор поддерживает коммуникационный интерфейс, который может быть использован со сторонними программами, поддерживающими TCP. Актуальность разработки Формулировка проблемы в общем виде. В ряде случаев материально-техническая база вузов не позволяет дать необходимые знания о мобильных роботах в силу их дороговизны, сложной технической оснастки и больших массогабаритных параметров. В результате нет возможности проведения экспериментов и исследований, а значит, уменьшается компетентность студентов в области робототехники. В связи с этим актуален поиск новых, экономически оправданных путей решения проблемы. Также следует отметить, что в условиях пандемии различные образовательные учреждения, в частности университеты, столкнулись с резким прерыванием учебного процесса в результате принятия необходимых мер для сдерживания развития нынешней ситуации. Это отрицательно сказывается на обучении студентов технических специальностей, которые лишились возможности проводить практические и лабораторные занятия, являющиеся основой в изучении инженерных предметов. Поэтому необходимо оперативно решать проблемы удаленного инженерного образования. Таким образом, сегодня актуальна разработка имитационной среды, специализированных виртуальных лабораторий, в которых студенты могут проводить широкий спектр экспериментов, максимально приближенных к реальности. Важным фактором также является обеспечение безопасности как студентов, так и оборудования. Эти проблемы позволяет решить предложенный в данной статье виртуальный учебный комплекс. Назначение симулятора. Одной из главных целей разрабатываемой виртуальной среды является предоставление исследователям и инженерам, работающим с системами всенаправленного зрения, больших возможностей в плане тестирования теорий и алгоритмов. Например, при наличии ПО может отсутствовать аппаратное оснащение. Имея симулятор, можно решить данную проблему. Отдельного внимания в области робототехники заслуживают такие направления, как SLAM, планирование пути, семантическая сегментация и т.д. Однако в реальных ситуациях присутствует погрешность экспериментов, определяемая классом точности прибора измерения. Преимуществом предлагаемого симулятора является то, что виртуальная лаборатория позволяет проводить эксперименты в идеальных условиях, за счет чего становятся возможными оценка погрешностей и анализ взаимосвязи между исследуемыми параметрами, а также прогнозирование влияния внешних или внутренних возмущений на поведение системы в целом. Симулятор работает быстрее реальных роботов и удобнее в использовании, чем физические эксперименты. Возможности симулятора открывают новые методы оценки эффективности различного вида экспериментов. Обзор симулятора
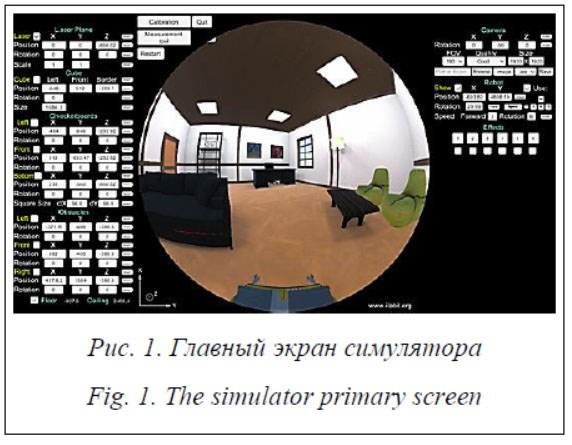
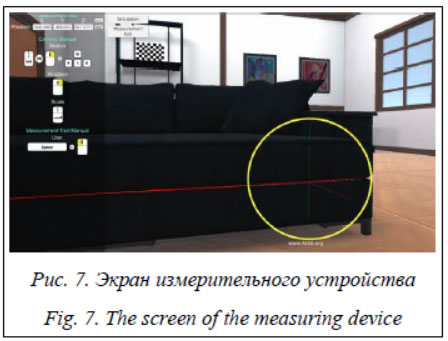
На главном экране проводятся экспери-менты. iLabit OmViSys является первым симу-лятором, в состав которого был добавлен источник структурированного света, расположенный на мобильном роботе. Проекция красного луча на сцену позволяет рассчитать расстояние от мобильного робота до окружающих его объектов. На левой панели главного экрана располагается секция Laser Plane, которая отвечает за конфигурирование источника структурированного света. Таким образом, у пользователя появляется возможность варьировать расположением источника, его ориентацией и масштабом в пространстве. Основным преимуществом использования структурированного света является его простой механизм обнаружения на изображении и извлечения для последующей обработки.
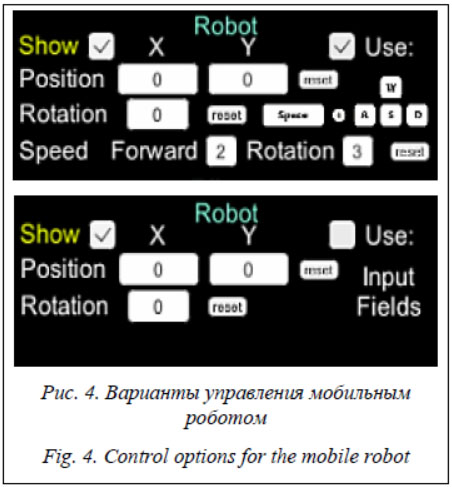
Основная задача системы компьютерного зрения состоит в правильном определении расстояний до препятствий. Следовательно, посредством секции Obstacles могут быть добавлены препятствия (рис. 3) для оценки точности откалибровки системы. Правая панель главного экрана состоит из трех секций: Camera, Robot и Effects. Секция Camera отвечает за настройки всенаправленной камеры, изменениям поддаются такие параметры, как ориентация в пространстве, поле зрения (180o, 210o, 240o), качество рендера, разрешение изображения, расширение изображения (.jpg или .png).
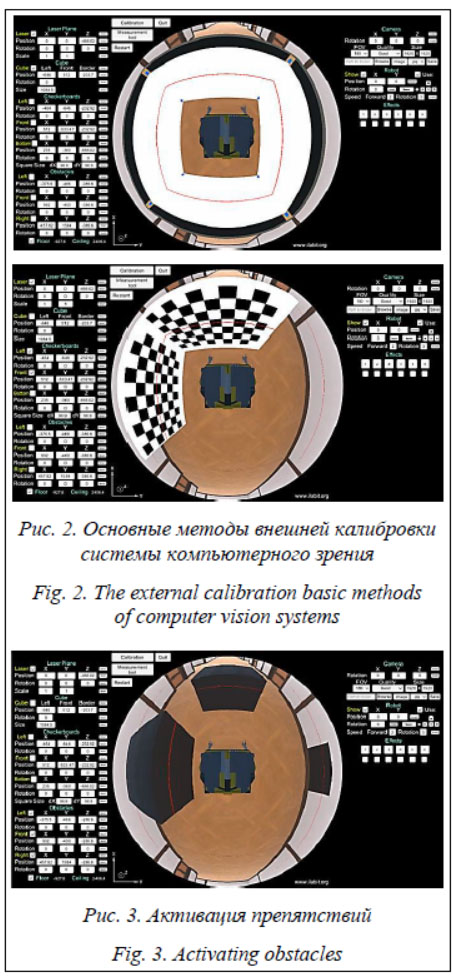
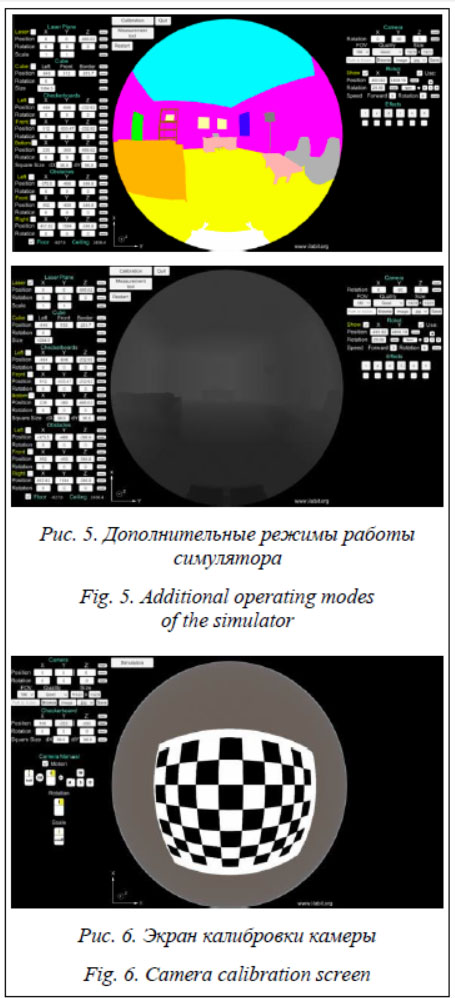
Последняя секция – Effects. Достижения в области обучения нейронных сетей требуют большого объема данных для обучения, генерация которых в ряде случаев затруднительна, например, ручная маркировка изображений для обучения сетей семантической сегментации. Проблема с ручной маркировкой в том, что сам процесс занимает много времени, так как изображения могут содержать широкий спектр элементов, что еще более актуально в случае с изображениями со всенаправленных камер. Одним из преимуществ разработанного симулятора является то, что он может обеспечивать автоматическую маркировку основных элементов сцены (рис. 5), а также позволяет генерировать карту глубины, которая может быть использована для обучения нейронных сетей. Экран калибровки камеры позволяет собрать данные для процесса калибровки внутренних параметров камеры. Он содержит всенаправленную камеру и шаблон с известной геометрией в виде шахматной доски. Камера не отличается от расположенной на главном экране и содержит схожие настройки. Единственным отличием является дополнительный способ управления ею. В случае с установленной галочкой в поле Motion (рис. 6) управление осуществляется при помощи клавиш клавиатуры w/a/s/d и мышки. Второй вариант управления – ручной ввод позиции и ориентации камеры. Такой подход может быть полезен для экспериментов с точным позиционированием камеры, галочка в поле Motion в этом случае неактивна.
Заключение В данной статье рассмотрен симулятор, который может быть использован для широкого набора приложений, охватывающих различные области компьютерного зрения. iLabit OmViSys – это первый полноценный симулятор на базе всенаправленной камеры, к тому же включающий в свой состав структурированный свет. Виртуальная среда не только генерирует синтетические данные, но и включает в себя полный набор инструментов для оценки и изучения новых условий окружающей среды, которые нелегко, а в ряде случаев невозможно контролировать или воспроизводить в реальном мире. ПО сохранило простой, но мощный интерфейс, который, помимо взаимодействия с симулятором, поддерживает обмен данными со сторонними программами по протоколу TCP. Автор надеется, что этот симулятор станет ценным инструментом для исследователей, а также будет полезен тем, кто не располагает дорогостоящим оборудованием на проведение экспериментов. В последующих работах будут подробно рассмотрены проблемы, косвенно означенные в данной статье. Посредством симулятора будут разработаны новые методы калибровки системы компьютерного зрения совместно с методами реконструкции помещения за счет информации со всенаправленной камеры в комбинации со структурированным светом. Литература 1. Andaluz V.H., Lopez E., Manobanda D., Guamushig F., Chicaiza F., Sanchez J.S., Rivas D. et al. Nonlinear controller of quadcopters for agricultural monitoring. In: Advances in Visual Computing, 2015, pp. 476–487. DOI: 10.1007/978-3-319-27857-5_43. 2. Andaluz V.H., Chicaiza F.A., Meythaler A., Rivas D.R., Chuchico C.P. Construction of a quadcopter for autonomous and tele-operated navigation. Proc. DCIS, 2015, pp. 1–6. DOI: 10.1109/DCIS.2015.7388600. 3. Andaluz V.H., Canseco P., Varela J., Flavio R., Carelli R. Robust control with dynamic compensation for human wheelchair system. Proc. ICIRA, 2014, pp. 376–389. 4. Bazarov S.E., Kholodilin I.Y., Nesterov A.S., Sokhina, A.V. Applying augmented reality in practical classes for engineering students. Proc. IOP Conf. Ser.: Earth Environ. Sci., 2017, vol. 87, art. 032004. DOI: 10.1088/1755-1315/87/3/032004. 5. Won C., Ryu J., Lim J. SweepNet: Wide-baseline omnidirectional depth estimation. Proc. ICRA, 2019, pp. 6073–6079. DOI: 10.1109/ICRA.2019.8793823. 6. Zhang Z., Rebecq H., Forster C., Scaramuzza D. Benefit of large field-of-view cameras for visual odometry. Proc. ICRA, 2016, pp. 801–808. DOI: 10.1109/ICRA.2016.7487210. 7. Bourke P. Creating fisheye image sequences with Unity3D. 2015. URL: https://www.researchgate.net/publication/279963195_Creating_fisheye_image_sequences_with_Unity3D (дата обращения: 08.06.2020). 8. ILabit OmViSys. Virtual Laboratory. URL: https://www.ilabit.org/omvisys (дата обращения: 11.01.2021). 9. Холодилин И.Ю., Савостеенко Н.В., Нестеров А.С., Киселева А.А., Панов К.Э., Дудкин М.М. Программа по изучению курса компьютерное зрение «iLabit OmViSys»: ПрЭВМ № 2019667285. Рос. Федерация, 2019. 10. Gu Z., Liu H., Zhang G. Real-time indoor localization of service robots using fisheye camera and laser pointers. Proc. IEEE ROBIO, 2014, pp. 1410–1414. DOI: 10.1109/ROBIO.2014.7090531. 11. Son Y., Yoon S., Oh S., and Han S. A lightweight cost-effective 3D omnidirectional depth sensor based on laser triangulation. IEEE Access, 2019, vol. 7, pp. 58740–58750. DOI: 10.1109/ACCESS.2019.2914220. 12. De Ruvo P., De Ruvo G., Distante A., Nitti M., Stella E., Marino F. An Omnidirectional range sensor for environmental 3-D reconstruction. Proc. IEEE ISIE, 2010, pp. 396–401. DOI: 10.1109/ISIE.2010.5637870. 13. Zhang G., Wei Z. A novel calibration approach to structured light 3D vision inspection. Optics and Laser Technology, 2002, vol. 34, no. 5, pp. 373–380. DOI: 10.1016/S0030-3992(02)00031-2. 14. Zexiao X., Weitong Z., Zhiwei Z., Ming J. A novel approach for the field calibration of line structured-light sensors. Measurement, 2010, vol. 43, pp. 190–196. DOI: 10.1016/j.measurement.2009.09.008. 15. Liu Z., Li X., Li F., Zhang G. Calibration method for linestructured light vision sensor based on a single ball target. Optics and Lasers in Engineering, 2015, vol. 69, pp. 20–28. DOI: 10.1016/j.optlaseng.2015.01.008. References
|
| Постоянный адрес статьи: http://swsys.ru/index.php?page=article&id=4792&lang=&lang=&like=1 |
Версия для печати Выпуск в формате PDF (7.81Мб) |
| Статья опубликована в выпуске журнала № 1 за 2021 год. [ на стр. 157-163 ] |
Возможно, Вас заинтересуют следующие статьи схожих тематик:
- Внешняя калибровка всенаправленной системы компьютерного зрения и метод реконструкции внутренней среды помещения
- Квантовый генетический алгоритм в задачах моделирования интеллектуального управления и суперкомпьютинг
- Использование симулятора планировщика заданий для оценки эффективности предсказания времени работы задания
- Подходы к разработке и отладке симуляторов на основе QEMU с помощью высокоуровневого языка описания архитектур PPDL
Назад, к списку статей