Journal influence
Bookmark
Next issue
Method of functioning of the onboard radar system while ensuring their stealth operation on radiation
Abstract:The survivability of a military aircraft depends to a significant extent on the survivability of its on-Board radar station, the main areas of improvement of which are, first, the application of the multi-position principle of building on-Board radars, and secondly, increasing the stealth of its work on radi-ation. This paper sets and solves the problem of developing a method that combines these areas of in-creasing survivability. The application of the multi-position principle is implemented by combining all on-Board radars into a single system controlled by the on-Board radar of the leader aircraft, which is determined in advance and serves as a point for processing radar information received from the on-Board radars of all the group's aircraft and issuing information to all the group's aircraft about the re-quired parameters of their on-Board radars. Secrecy operation of the system of airborne radar at the ra-diation detection group of enemy aircraft, equipped with electronic intelligence stations, implemented by means of reception on each side of the radar system information from the aircraft-leader about the required parameters, their on-Board radars, namely the values of the average radiation power of the transmitter, the time of coherent accumulation in the receiver and the time of irradiation of air targets and the formation of current data values of managed parameters of the onboard radar so that the differ-ence between the required and current values of the onboard radar parameters is zero. Held on Board the aircraft-leader calculations given in this paper, the results of these calculations for each on-Board radar systems as well as manage settings of each onboard radar systems allow you to control the signal-noise generated at the input of the receivers of all stations of electronic intelligence of the enemy, and thereby to ensure the secrecy of the operation of the onboard radar system for radia-tion with a given probability upon detection of a group of enemy aircraft equipped with radio engineer-ing reconnaissance.
Аннотация:Живучесть летательного аппарата военного назначения в существенной степени зависит от живучести его бортовой РЛС, основными направлениями повышения которой являются, во-первых, применение многопозиционного принципа построения бортовых РЛС, во-вторых, повышение скрытности ее работы на излучение. В статье поставлена и решена задача разработки метода, объединяющего данные направления повышения живучести. Применение многопозиционного принципа реализовано за счет объединения всех бортовых РЛС в единую систему, управляемую бортовой РЛС самолета-лидера, определяемого заранее и выполняющего функцию пункта обработки радиолокационной информации, поступающей с бортовых РЛС всех самолетов группы, и выдачи информации на все самолеты группы о требуемых параметрах работы их бортовых РЛС. Обеспечение скрытности работы си-стемы бортовых РЛС на излучение при обнаружении группы самолетов противника, оснащенных станциями радиотехнической разведки, реализовано посредством приема на каждой бортовой РЛС системы информации с самолета-лидера о требуемых параметрах работы их бортовых РЛС, а именно значений средней мощности излучения передатчика, времени когерентного накопления в приемнике и времени облучения воздушной цели и формирования текущих значений данных управляемых параметров работы бортовой РЛС таким образом, чтобы разность между требуемыми и текущими значениями параметров работы бортовых РЛС была равна нулю. Проводимые на борту самолета-лидера вычисления, приведенные в статье, выдача результатов вычислений на каждую бортовую РЛС системы, а также управление параметрами работы каждой бортовой РЛС системы позволяют контролировать отношение сигнал/шум, формируемое на входе приемников всех станций радиотехнической разведки противника, и тем самым обеспечить скрытность работы системы бортовых РЛС на излучение с заданной вероятностью при обнаружении группы самолетов противника, оснащенных станциями радиотехнической разведки.
| Authors: A.V. Bogdanov (denjuga68@yandex.ru) - Military Academy of the Aerospace Defence (Professor ), Tver, Russia, Ph.D, D.V. Zakomoldin (denjuga68@yandex.ru) - Military Academy of the Aerospace Defence (Doctoral Student), Tver, Russia, Ph.D, S.I. Akimov (denjuga68@yandex.ru) - Military Academy of the Aerospace Defence (Adjunct ), Tver, Russia | |
| Keywords: pulse-doppler airborne radar, fighter, radio intelligent station, stealth operation, parameter control, radiation power, coherent accumulation time, multi-position radar, system |
|
| Page views: 3332 |
PDF version article |
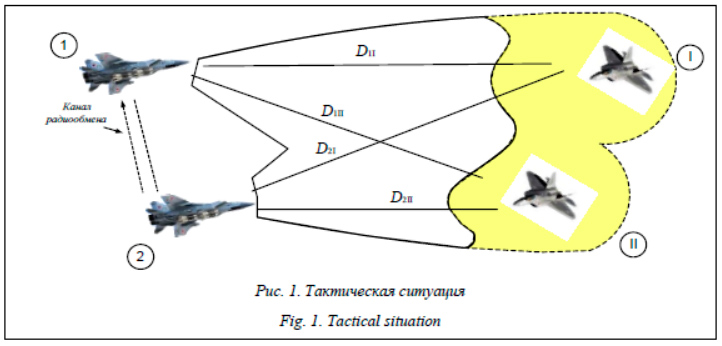
Известно, что повышение живучести летательного аппарата военного назначения (истребителя, беспилотного летательного аппарата), в частности, импульсно-доплеровской бортовой РЛС (БРЛС), которой он оснащен, в последние десятилетия является устойчивой тенденцией его совершенствования. Следует выделить два основных направления повышения данного показателя [1, 2]: - использование многопозиционного принципа построения БРЛС, который дополнительно обеспечивает расширение их функциональных возможностей [3–5]; - повышение скрытности каждого летательного аппарата в составе группы. Под многопозиционным принципом построения РЛС в общем случае понимаются РЛС, включающие несколько разнесенных пе- редающих, приемных и приемопередающих позиций, в которых получаемая ими информация о целях обрабатывается совместно [3, 6]. В данной статье рассмотрена ситуация, когда приемопередающие позиции (БРЛС) расположены на борту летательного аппарата. Под скрытностью понимается свойство летательного аппарата, исключающее возможность его обнаружения средствами активной и пассивной разведки противника. Основным направлением противодействия средствам активной разведки является применение специальных покрытий и материалов в интересах снижения эффективной поверхности отражения летательного аппарата. Этому посвящено отдельное направление исследований [7–9]. Однако эффективность данных технических мер оправдывается только при полете в режиме полного радиомолчания ввиду того, что большинство современных средств воздушно-космического нападения оснащены средствами пассивной разведки, а именно станциями радиотехнической разведки (РТР), и имеют возможность обнаружить излучаемый БРЛС зондирующий сигнал и, как следствие, летательный аппарат в целом. В данной работе будет уделено внимание именно обеспечению скрытной работы БРЛС на излучение. С учетом этого цель авторов – разработка метода, комбинирующего два описанных направления повышения живучести и заключающегося в управлении параметрами импульсно-доплеровской БРЛС каждого летательного аппарата в составе группы (многопозиционный принцип построения БРЛС) при работе каждой БРЛС на излучение в интересах обеспечения скрытности их работы с заданной вероятностью при обнаружении группы летательных аппаратов противника, оснащенных станциями РТР. Физический смысл метода Рассмотрим конкретную тактическую ситуацию (рис. 1).
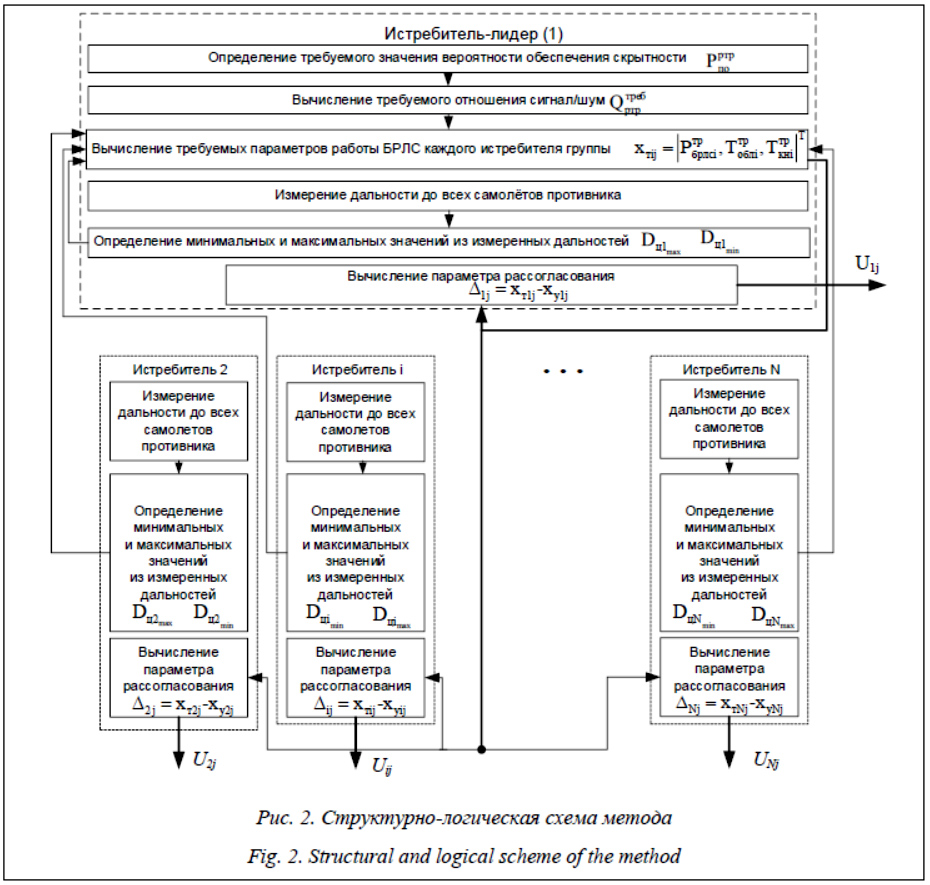
- расстояние между первым истребителем и первым самолетом противника больше расстояния между первым истребителем и вторым самолетом противника, D1I> D1II; - расстояние между вторым истребителем и первым самолетом противника больше расстояния между вторым истребителем и вторым самолетом противника, D2I> D2II. Для обеспечения данной ситуации из всего состава группы определяется истребитель-лидер, на котором осуществляется обработка радиолокационной информации, и все импульсно-доплеровские БРЛС остальных истребителей группы объединяются в единую систему посредством формирования канала обмена информацией между каждым истребителем и истребителем-лидером. Далее в соответствии со штатным функционированием в каждой i-й, где В процессе функционирования в каждой i-й импульсно-доплеровской БРЛС каждого i-го истребителя группы определяются макси- мальные На истребителе-лидере определяется требуемое отношение сигнал/шум
где h – величина порога, определяющая значение вероятности ложной тревоги Далее на импульсно-доплеровской БРЛС истребителя-лидера формируются необходимые для обеспечения требуемого отношения сигнал/шум
где, кроме ранее принятых, Tci – время обработки сигнала, излученного i-м истребителем группы, в каждой станции РТР каждого самолета противника; k = (0, …, 1) – коэффициент проигрыша энергии сигнала при его обработке на станции РТР по сравнению с его когерентной обработкой в каждой i-й БРЛС; Zi – поправочный коэффициент при переносе i-й БРЛС на позицию БРЛС истребителя-лидера; R0 – отношение энергии сигнала к спектральной плотности шума, при котором обеспечивается обнаружение самолета противника с заданными вероятностными характеристиками. Кроме того, имеются характеристики, которые в общем случае могут быть различными, но для упрощения записей аналитических зависимостей приняты равными: G1, ..., GN = Gбрлс – коэффициенты направленного действия антенн бортовых РЛС всех истребителей группы; G1, ..., GМ = Gртр – коэффициенты направленного действия антенн станций РТР самолетов противника; l1, ..., lN = lбрлс – длины волн всех импульсно-доплеровских БРЛС; N01, ..., N0N = N0 – спектральные плотности мощностей внутренних шумов приемника импульсно-доплеровских БРЛС;
Sa1, …, SaN = Sa – эффективные площади приемных антенн всех импульсно-доплеровских БРЛС группы истребителей; sртр1, …, sртрM = sртр – эффективная площадь отражения каждого самолета противника из состава их группы; aп1, …, aпN = aп – коэффициенты потерь энергии сигнала при его обработке в приемнике в каждой i-й импульсно-доплеровской БРЛС; Q1, …, QM – требуемые отношения сигнал/шум на входе приемника каждой станции РТР каждого самолета противника, причем Выражение (3) обусловлено следующим [11]. С учетом
где
где Рртр – чувствительность приемника станции РТР, учитывая то, что система из N импульсно-доплеровских БРЛС работает на излучение (то есть излучаемая мощность каждой i-й БРЛС каждого i-го истребителя группы должна быть в N раз меньше в интересах обеспечения скрытности работы на излучение всех БРЛС их системы) и заменив ее (систему БРЛС) на эквивалентный источник излучения, располагаемый на позиции самолета-лидера (i = 1), а также учитывая, что станция РТР обнаруживает наиболее доступный зондирующий сигнал БРЛС истребителя-лидера группы, находящийся на минимальном до нее расстоянии , то, приравняв , выражение (9) преобразуется к виду (3). Наличие в выражении (4) характеризующего требуемое значение излучаемой мощности передатчика каждой i-й БРЛС из состава их системы каждого i-го истребителя группы для всех остальных, кроме истребителя-лидера, истребителей группы (i ¹ 1), поправочного коэффициента Zi, вычисляемого в соответствии с выражением (5), обусловлено переносом данной i-й БРЛС с дальности Выражение (5) определяется исходя из принятых допущений, преобразующих выражение (9) в выражение (3), и решением системы вида
приравняв Выражение (6) обусловлено необходимостью сохранения возможности обнаружения каждой i-й БРЛС из состава их системы каждого i-го истребителя группы максимально удаленного самолета противника из состава их группы, находящегося на дальности
выразив время когерентного накопления Ткн и приравняв Выражение (7) обусловлено отсутствием на каждом самолете противника, оснащенном станцией РТР, априорной информации о параметрах зондирующего сигнала каждой i-й БРЛС, что приводит к проигрышу в энергии сигнала при его обработке в станции РТР самолета противника относительно когерентной обработки в БРЛС истребителя. Далее вычисленный на самолете-лидере в соответствии с выражениями (3)–(7) требуемый вектор параметров работы каждой в составе системы БРЛС С учетом полученной информации о xTij формируется параметр рассогласования ∆ij, пропорционально которому вырабатывается управляющий сигнал Uij в интересах управления в каждой i-й БРЛС каждого i-го истребителя из состава группы средней мощностью излучения Рбрлс передатчика и временами когерентного накопления сигнала Ткн в приемнике и облучения Тобл группы самолетов противника, в соответствии с выражением
где
Таким образом, для обеспечения скрытности работы системы импульсно-доплеровских БРЛС при групповых действиях истребителей на излучение с заданной вероятностью при фиксированной вероятности ложного обнаружения излучения системы БРЛС станциями РТР противника, во-первых, на самолете-лидере в соответствии с выражениями (1) и (2) определяется требуемое отношение сигнал/шум Информационное обеспечение для реализации данного метода представляет собой измеренные значения дальности. Техническая реализация метода
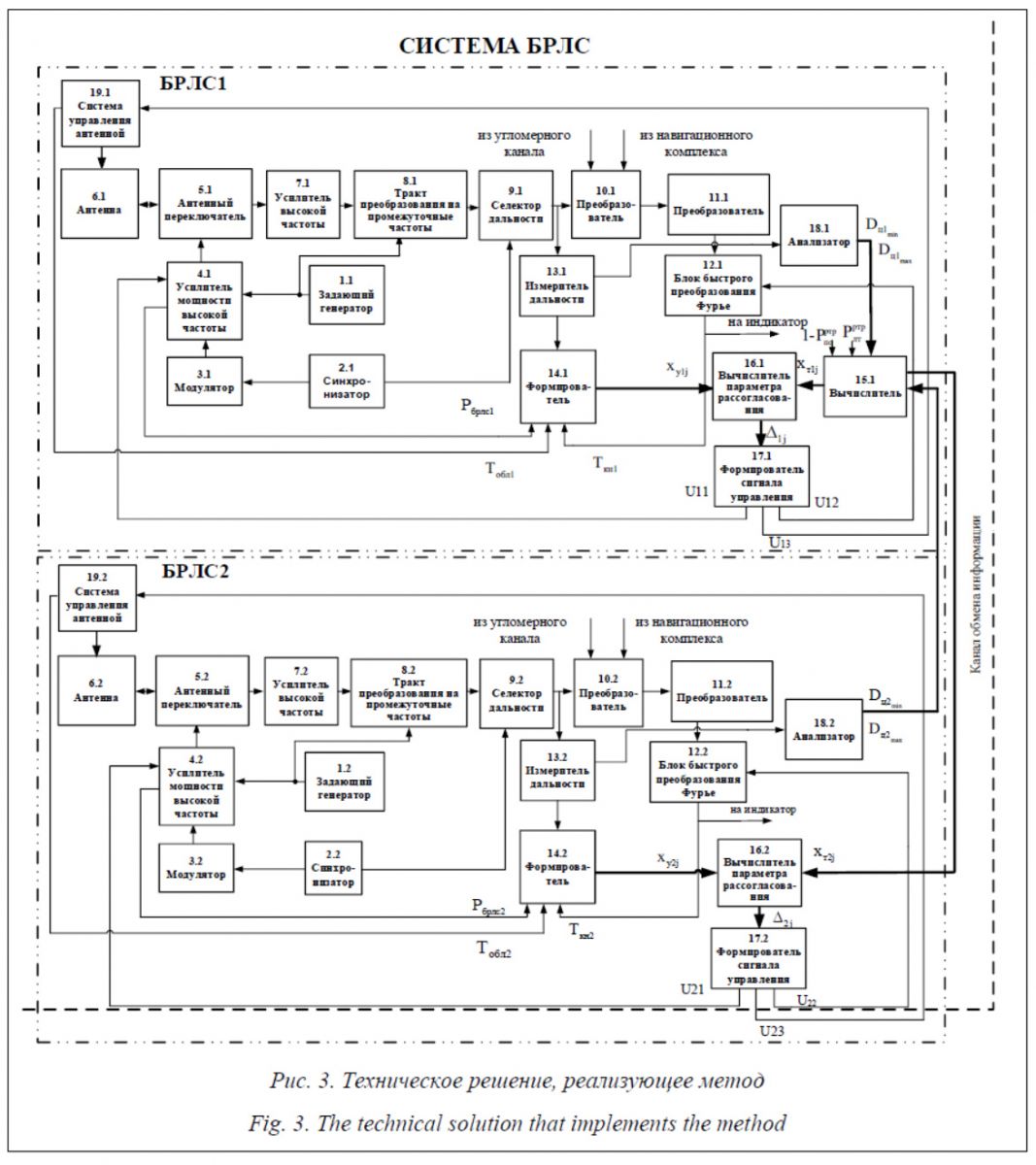
С помощью задающих генераторов 1.1, 1.2, синхронизаторов 2.1, 2.2 и модуляторов 3.1, 3.2 каждой из двух БРЛС формируются высокочастотные последовательности зондирующих импульсов, которые усиливаются в усилителях мощностей высокой частоты 4.1, 4.2 с управляемыми коэффициентами усиления и через антенные переключатели 5.1, 5.2, антенны 6.1, 6.2 излучаются в направлении двух самолетов противника, каждый из которых оснащен станцией РТР. Отраженные от самолетов противника сигналы принимаются антеннами 6.1, 6.2 и через антенные переключатели 5.1, 5.2 поступают в приемники БРЛС1 и БРЛС2, в которых усиливаются в усилителях 7.1, 7.2 высокой частоты, преобразуются в трактах 8.1, 8.2 преобразования на промежуточные частоты, селектируются по дальности в селекторах 9.1, 9.2 дальности с помощью селекторных импульсов, поступающих на их вход с выхода синхронизаторов 2.1, 2.2. В измерителях дальности 13.1, 13.2 измеряются значения дальности до каждого самолета противника, которые поступают в анализаторы 18.1, 18.2, где определяются максимальная и минимальная дальности до каждого самолета противника. Истребителем-лидером назначается первый истребитель с его БРЛС1, в состав которой входит анализатор 18.1. С БРЛС2 второго истребителя, в состав которой входит анализатор 18.2, значения максимальной В преобразователях 10.1 и 10.2, соответственно БРЛС1 и БРЛС2, на входы которых поступают значения углов ориентации диаграмм направленности антенн в вертикальной и горизонтальной плоскостях с выходов угломерных каналов (на схеме не показаны) и значения собственных скоростей носителей БРЛС с выходов навигационных комплексов (на схеме не показаны), осуществляется селекция сигналов по доплеровским частотам. В преобразователях 11.1 и 11.2, соответственно БРЛС1 и БРЛС2, сигналы из аналоговой формы преобразуются в цифровую форму, поступают на входы блоков быстрого преобразования Фурье 12.1 и 12.2, соответственно БРЛС1 и БРЛС2, где осуществляется их спектральный анализ, и с их выходов – на индикаторы соответствующих БРЛС1 и БРЛС2. Одновременно на вход вычислителя 15.1 БРЛС1 поступают: - с канала обмена информации с выхода БРЛС2 второго истребителя значения максимальной - с выхода анализатора 18.1 БРЛС1 значе- ния максимальной - заданная вероятность обеспечения скрытности работы системы из двух БРЛС на излучение ( В вычислителе 15.1 БРЛС1 в соответствии с выражениями (1)–(7) рассчитываются требуемые значения управляемых параметров . Причем значения xT1j поступают на вход вычислителя параметра рассогласования 16.1 БРЛС1 первого истребителя-лидера, а значения xT2j – в канал обмена информации для его передачи на вход вычислителя параметра рассогласования 16.2 БРЛС2 второго истребителя. На вторые входы вычислителей параметров рассогласования 16.1 и 16.2, соответственно БРЛС1 и БРЛС2, поступают текущие значения управляемых параметров xT1j и xT2j в БРЛС1 и БРЛС2 соответственно. Значения управляемых параметров xyij формируются в формирователях управляемых параметров 14.1 и 14.2, соответственно БРЛС1 и БРЛС2, на основе текущих значений управляемых параметров Pбрлс1, Tобл1 и Tкн1 функционирования БРЛС1 и Pбрлс2, Tобл2 и Tкн2 функционирования БРЛС2, поступающих на их входы соответственно с выходов усилителей мощности высокой частоты 4.1 и 4.2, систем управления антенн 19.1 и 19.2 и блоков 12.1 и 12.2 (в которых время когерентного накопления Tкн обратно пропорционально эквивалентной полосе пропускания одного бина алгоритма БПФ), соответственно БРЛС1 и БРЛС2. Причем значения управляемых параметров xyij формируются на выходах формирователей 14.1 и 14.2 только при наличии на их входах сигналов, поступающих с измерителей дальности 13.1 и 13.2, соответственно БРЛС1 и БРЛС2, что свидетельствует об обнаружении самолетов противника в БРЛС1 и БРЛС2, а следовательно – и о необходимости обеспечения энергетической скрытности работы на излучение обеих БРЛС1 и БРЛС2. С выходов вычислителей параметров рассогласования 16.1 и 16.2, соответственно БРЛС1 и БРЛС2, значения Dij поступают на входы формирователей сигналов управления 17.1, 17.2 соответствующих БРЛС1 и БРЛС2, на выходах которых формируются сигналы управления U11, U12, U13 в БРЛС1 и U21, U22, U23 в БРЛС2, пропорциональные параметрам рассогласования D1j и D2j соответственно. Данные сигналы управления поступают на входы усилителей мощности высокой частоты 4.1 и 4.2, блоки быстрого преобразования Фурье 12.1 и 12.2 и систем управления антенной 19.1 и 19.2 соответствующих БРЛС1 и БРЛС2. Так, с помощью сигналов управления U11 и U21 в усилителях мощности высокой частоты 4.1 и 4.2, соответственно БРЛС1 и БРЛС2, осуществляется изменение их коэффициентов усиления для изменения мощностей Pбрлс1 и Pбрлс2 передатчиков БРЛС1 и БРЛС2, с помощью сигналов управления U12 и U22 в блоках быстрого преобразования Фурье 2.1 и 2.2 осуществляется изменение эквивалентных полос пропускания одного бина алгоритма БПФ (времен Tкн1 и Tкн2 когерентного накопления сигнала в приемниках БРЛС1 и БРЛС2), а с помощью сигналов управления U13 и U23 в системах 19.1 и 19.2 управления антеннами осуществляется изменение времен Tобл1 и Tобл2 облучения самолетов против- ника, соответственно БРЛС1 и БРЛС2. Управ- ление значениями Pбрлсi, Tоблi и Tкнi (в рассматриваемом примере i = 1, 2) будет осуществляться до тех пор, пока параметр рассогласования Dij ( Выводы Таким образом, авторами статьи разработан метод функционирования системы импульсно-доплеровских бортовых РЛС при их совместной работе на излучение в интересах скрытного обнаружения группы самолетов противника, оснащенных станциями РТР, а также предложено техническое решение, позволяющее реализовать представленный метод. Литература 1. Верба В.С. Системные показатели авиационных радиоэлектронных систем управления // Успехи современной радиоэлектроники. 2013. № 4. С 34–39. 2. Верба В.С. Разработка перспективных бортовых РЛС: возможности и ограничения // Радиотехника. 2019. Т. 83. № 5. С. 11–24. DOI 10.18127/j00338486-201905(I)-03. 3. Черняк В.С. Многопозиционная радиолокация. М.: Радио и связь, 1993. 416 с. 4. Willis N.J. and Griffiths H.D. Advances in bistatic radar. IEEE Aerospace and Electronic Systems Magazine, 2007, vol. 23, no. 7, p. 46. DOI: 10.1109/MAES.2008.4579292. 5. Yang L., Gao H., Li B., Yang Y., Ru G. Joint position and velocity estimation of a moving target in multistatic radar by static range, TDOA, and doppler shifts. International Journal of Antennas and Propagation, 2019, vol. 2019, pp. 1–7. DOI: 10.1155/2019/4943872. 6. Меркулов В.И., Верба В.С., Ильчук А.Р. Автоматическое сопровождение целей в РЛС интегрированных авиационных комплексов. Теоретические основы. РЛС в составе интегрированного авиационного комплекса. М.: Радиотехника, 2018. 360 с. 7. Уфимцев П.Я. Метод краевых волн в физической теории дифракции. М.: Советское радио, 1962. 244 с. 8. Лагарьков А.Н., Погосян М.А. Фундаментальные и прикладные проблемы стелс-технологий // Вестн. РАН. 2003. Т. 73. № 9. С. 779–787. 9. Богданов А.В., Коротков С.С., Закомолдин Д.В., Лютиков И.В. Снижение радиолокационной заметности истребителя при работе его бортовой радиолокационной станции на излучение и при ведении противником радиотехнической разведки // Журнал СФУ: Техника и технологии. 2016. Т. 9. № 3. С. 442–447. 10. Тихонов В.И. Оптимальный прием сигналов. М.: Радио и связь, 1983. 320 с. 11. Богданов А.В., Голубенко В.А., Закомолдин Д.В., Кочетов И.В., Кучин А.А., Акимов С.И. Способ функционирования импульсно-доплеровской бортовой радиолокационной станции истребителя при обеспечении энергетической скрытности ее работы на излучение: пат. 2694891. Рос. Федерация. № 2019104450; заявл. 18.02.19; опубл. 18.07.19. Бюл. № 20. 3 с. 12. Дудник П.И., Кондратенков Г.С., Татарский Б.Г., Ильчук А.Р., Герасимов А.А. Авиационные радиолокационные комплексы и системы. М.: Изд-во ВВИА им. Н.Е. Жуковского, 2006. 1112 с. 13. Мельников Ю.П. Воздушная радиотехническая разведка. Методы оценки эффективности. М.: Радиотехника, 2005. 304 с. References
|

| Permanent link: http://swsys.ru/index.php?page=article&id=4762&lang=&lang=en&like=1 |
Print version |
| The article was published in issue no. № 4, 2020 [ pp. 651-660 ] |
Perhaps, you might be interested in the following articles of similar topics:
- Структуризация знаний о процессе схемного проектирования систем управления
- Формирование интегрального показателя эффективности функционирования информационной системы
- Программный комплекс для представления и преобразования дискретных структур знаний
- Система управления бизнес-процессами и административными регламентами
- О подходе к развитию методики построения радиолокационной системы
Back to the list of articles