Journal influence
Bookmark
Next issue
A method of identifying technical condition radio engineering means using artificial neural network technologies
Abstract:Due to the fact that modern military-grade radio equipment is becoming functionally and technologi-cally more complicated, the urgency of the task of creating functional control systems and identifying technical state of radio equipment is increasing. Nowadays, there are no effective and fully automatic systems for identifying technical state of vari-ous types of radio equipment. One of the ways to solve the problem is to create systems for identifying technical state of radio equipment is based on machine learning principles. A distinctive feature of the application of trained artificial neural networks to solve the identifying problem is the development of a prototype of the observed situations, generalizations for the predomi-nance and similarity in a variety of same type radio equipment, as well as high efficiency and reliabil-ity of solving this problem. The paper presents a method for identifying technical state of radio equipment using case-law prin-ciples of machine learning of artificial neural networks. It allows solving the problem of identifying current classes of the radio equipment technical condition based on measurement results of the main system controlled parameters in real time. Taking into account the problem specifics, the choice of a multilayer direct distribution neural net-work including three hidden layers is substantiated. The number of neurons of the input layer is deter-mined by the number of controlled parameters of the technical condition of the main systems of radio equipment of a particular type. The number of output layer neurons is determined by the number of possible classes of the radio equipment technical condition. Elementary converters of this network have an activation function of a sigmoid type. To train an artificial neural network, the authors used a heuristic modification of the Levenberg-Marquardt algorithm.
Аннотация:Современные радиотехнические средства военного назначения функционально и технологически усложняются, поэтому возрастает актуальность задачи создания систем функционального контроля и идентификации технического состояния радиотехнических средств. Эффективные и полностью автоматические системы идентификации технического состояния радиотехнических средств различных типов пока еще не построены. Одним из путей решения задачи является создание систем идентификации технического состояния радиотехнических средств, основанных на принципах машинного обучения. Отличительной особенностью применения обученных искусственных нейронных сетей для решения задачи идентификации технического состояния радиотехнических средств можно считать выработку прототипа наблюдаемых ситуаций, обобщений по преобладанию и подобию на множестве однотипных радиотехнических средств, а также высокую оперативность и достоверность решения данной задачи. В статье представлен метод идентификации технического состояния радиотехнических средств с использованием прецедентных принципов машинного обучения искусственных нейронных сетей. С его помощью в реальном масштабе времени решается задача идентификации текущих классов технического состояния радиотехнических средств на основе результатов измерений контролируемых параметров их основных систем. С учетом специфики решаемой задачи обоснован выбор многослойной нейронной сети прямого распространения, включающей три скрытых слоя. Количество нейронов входного слоя определяется количеством контролируемых параметров технического состояния основных систем ра-диотехнических средств конкретного типа, а нейронов выходного слоя – количеством возможных классов технического состояния радиотехнических средств. Элементарные преобразователи данной сети имеют функцию активации сигмоидального вида. Для обучения искусственной нейронной сети применяется эвристическая модификация алгоритма Левенберга–Марквардта.
| Authors: Dopira R.V. (rvdopira@yandex.ru) - NPO RusBITex (Professor, Head of Department), Tver, Russia, Ph.D, A.A. Shvedun (ashvedun@mail.ru) - Military Academy of the Aerospace Defense (Postgraduate Student), Tver, Russia, D.V. Yagolnikov (yagolnikov_dv@mail.ru) - Military Academy of the Aerospace Defence (Lecturer), Tver, Russia, I.E. Yanochkin (i.yanochkin@rusbitech.ru) - Russian Basic Information Technologies (Head of Department), Tver, Russia, Ph.D | |
| Keywords: identification of a technical condition, artificial neural networks, radio engineering tools, machine learning, data normalization, heuristic modification of the levenberg-marquardt algorithm |
|
| Page views: 5182 |
PDF version article Full issue in PDF (4.91Mb) |
В современных условиях радиотехнические средства (РТС) военного назначения как технически сложные системы должны отвечать комплексу требований по обеспечению работоспособности в условиях воздействия различного рода влияющих факторов. Вместе с тем РТС и их составные элементы функционально и технологически усложняются. Поэтому необходимы непрерывный мониторинг и контроль параметров РТС для обеспечения их надлежащего функционирования, что, в свою очередь, требует создания систем функционального контроля и идентификации технического состояния РТС с высокой достоверностью. Анализ известных систем функционального контроля и идентификации технического состояния РТС [1] свидетельствует о том, что существует объективная научно-техническая задача создания комплексных систем мониторинга, построенных на универсальных принципах и обеспечивающих высокий уровень достоверности идентификации технического состояния изделий. Перспективным направлением для оценки технического состояния РТС яв- ляется использование нейросетевых техноло- гий [2]. Несмотря на то, что данная проблема рассматривалась рядом авторов [3–5], в настоящее время нет единого метода, позволяющего решить задачу идентификации технического состояния РТС в процессе их эксплуатации. В статье предлагается метод идентификации технического состояния РТС военного назначения с использованием интеллектуального метода на основе прецедентных принципов машинного обучения искусственных нейронных сетей, в котором в реальном масштабе времени решается задача идентификации текущих классов технического состояния РТС на основе результатов измерений контролируемых параметров их основных систем.
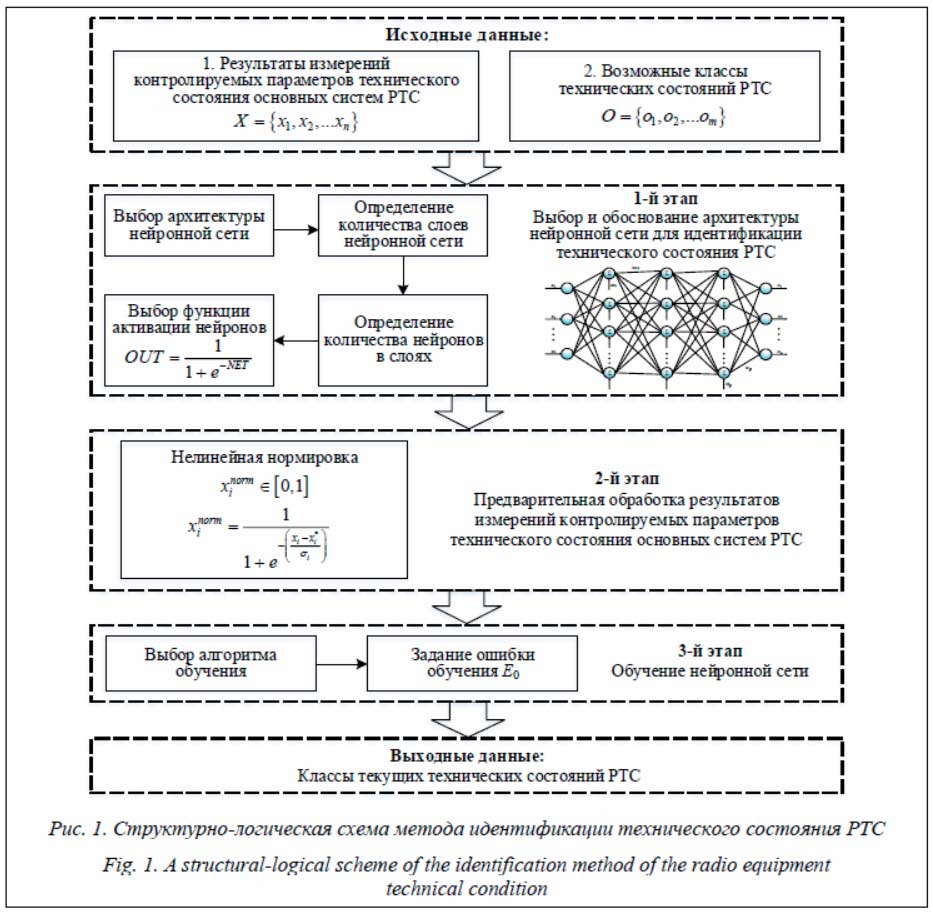
При рассмотрении данного метода следует учитывать, что техническое состояние РТС описывается совокупностью определяющих его параметров, причем для каждого конкретно выбранного РТС она может быть различной. В первую очередь, это обусловлено особенностями РТС, а также задачей идентификации. Идентификация технического состояния РТС – это процедура отнесения текущего технического состояния к одному из возможных классов (диагнозов). Существенной частью процесса идентификации является выбор параметров, описывающих техническое состояние РТС [6]. Они должны быть достаточно информативны, чтобы при выбранном числе диагнозов процесс разделения (распознавания) мог быть осуществлен. Задача оптимального выбора контролируемых параметров должна решаться изготовителем РТС, и их перечень должен быть отражен в нормативно-технической документации на РТС, поэтому будем считать, что набор контролируемых параметров задан. Метод идентификации технического состояния РТС состоит из последовательного выполнения трех этапов. Исходными данными являются результаты измерений контролируемых параметров технического состояния основных систем РТС и возможные классы технического состояния РТС. На первом этапе необходимо осуществить выбор и обоснование архитектуры искусственной нейронной сети для решения задачи идентификации технического состояния РТС. На данный момент известно множество архитектур искусственных нейронных сетей для решения различного рода задач [7]. Отличительной особенностью применения обученных многослойных нейронных сетей в целях контроля технического состояния РТС можно считать высокую достоверность идентификации технического состояния РТС с использованием технологий искусственного интеллекта: выработки прототипа наблюдаемых ситуаций, обобщений по преобладанию и подобию на множестве однотипных РТС, а также высокую оперативность решения данной задачи. В интересах идентификации и контроля технического состояния РТС наиболее перспективными являются три базовые архитектуры искусственных нейронных сетей, краткая характеристика которых приведена в таблице. Как видно из таблицы, многослойные нейронные сети прямого распространения обладают наибольшей информационной емкостью и требуемой обобщающей способностью при контроле технического состояния РТС, а недостаток, связанный с необходимым большим объемом обучающей выборки, несущественен при ее наличии [8]. Соответственно, для идентификации технического состояния РТС выбрана архитектура многослойной нейронной сети прямого распространения, которая позволит оперативно решить данную задачу с заданной достоверностью. Также при построении обучаемых (самообучаемых) систем идентификации в целях контроля технического состояния РТС необходимо учитывать то, что они должны быть надежными в вычислениях и устойчивы к ошибкам измерений и помехам. Устойчивость к помехам обеспечивается распределенной структурой многослойных нейронных сетей прямого распространения. Кроме того, предложенная архитектура искусственной нейронной сети обладает способностью к самообучению, гибкостью и устойчивостью при аппроксимации несвязных областей в признаковых пространствах.
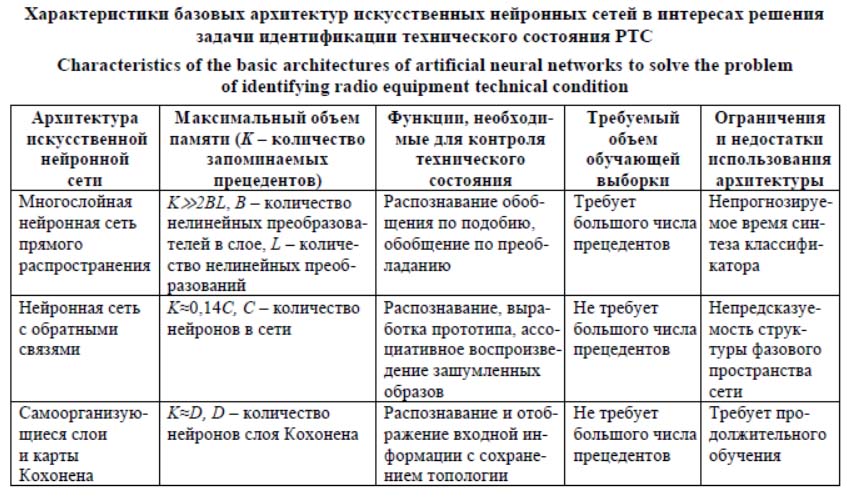
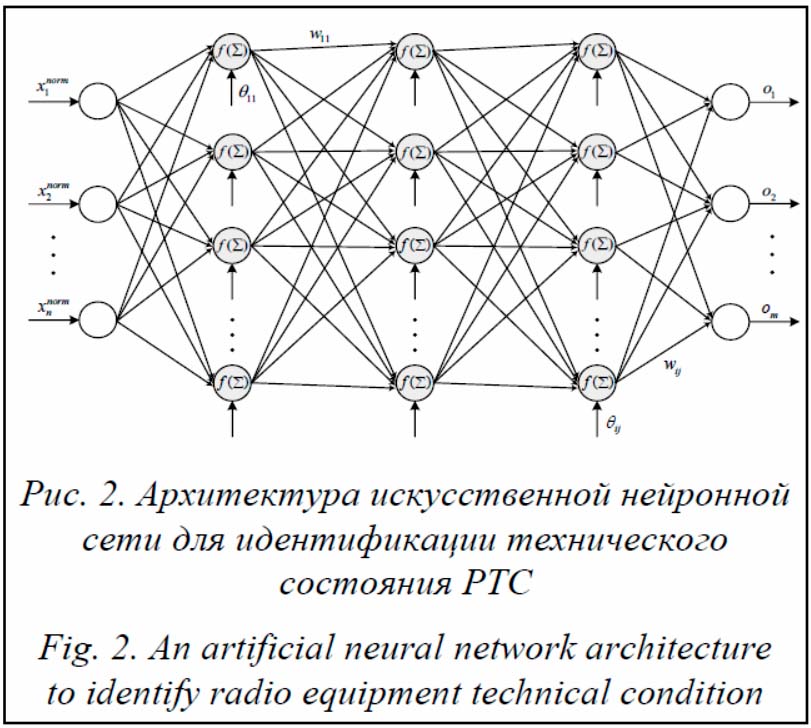
Первый (левый) слой нейронов – это входной слой, на который подаются нормированные значения контролируемых параметров технического состояния основных систем РТС. Количество нейронов входного слоя определяется количеством контролируемых параметров основных систем РТС конкретного типа. За ним следует скрытый слой, включающий три слоя, в котором обрабатывающие элементы связаны с предшествующим и последующим слоями. Правый слой – выходной, для снятия данных о классе технического состояния РТС. Количество нейронов выходного слоя определяется количеством возможных классов технических состояний РТС конкретного типа. Все слои искусственной нейронной сети являются полностью взаимосвязанными. На рисунке 2 использованы следующие обозначения: {x1, x2, …, xn} – нормированные значения контролируемых параметров технического состояния основных систем РТС; {w11, …, wij} – весовые коэффициенты между i-м и j-м нелинейными преобразователями; {q11, …, qij} – значения смещений или пороговых величин в сумматорах нелинейных преобразователей; {o1, o2, …, om} – возможные классы технического состояния РТС; f(S) – активационная функция элементарных преобразователей сети. Структура нейронов (элементарных преобразователей) сети схематично представлена на рисунке 3 [7].
Нейрон состоит из взвешенного сумматора и нелинейного элемента. Функционирование искусственного нейрона определяется форму- лами: NET = Sxnwm, OUT = f(NET – q), где xn – входные сигналы; wn – весовые коэффициенты; NET – взвешенная сумма входных сигналов; θ – пороговый уровень данного нейрона; f(S) – нелинейная функция, называемая функцией активации. Далее необходимо выбрать вид функции активации нейронов сети. Вид функции активации нейрона не всегда оказывает принципиальное влияние на решение поставленной задачи, однако удачный выбор может сократить время обучения искусственной нейронной сети в несколько раз. Выбор функции активации определяется спецификой решаемой задачи, удобством реализации, а также алгоритмом обучения нейронной сети: некоторые алгоритмы накладывают ограничения на вид функции активации, их нужно учитывать. Таким образом, функция активации должна позволять моделировать схемы с непрерывными сигналами и иметь непрерывную первую производную для применения градиентных методов обучения искусственных нейронных сетей. Данным требованиям удовлетворяют следующие функции активации нейронов. 1. Логистическая (сигмоидальная) функция:
где a – параметр крутизны функции. Часто применяется для сетей с непрерывными сигналами. Гладкость и непрерывность функции – важные положительные качества. Непрерывность первой производной позволяет обучать сеть градиентными методами. Значение производной легко выражается через саму функцию: OUT’ = OUT(1 – OUT). Быстрый расчет производной ускоряет обу- чение нейронной сети. Данная функция сжимающая, то есть для малых значений NET коэффициент передачи K = OUT/NET велик, для больших значений он снижается. Поэтому диапазон сигналов, с которыми нейрон работает без насыщения, оказывается широким. Также положительным качеством сигмоида является то, что он позволяет усиливать слабые сигналы и не насыщаться от сильных. 2. Гиперболический тангенс:
Очень похож на логистический сигмоид: непрерывен, ограничен и производную от него также легко вычислить: tanh’(NET) = 1 – tanh2(NET). По сравнению с логистическим сигмоидом гиперболический тангенс значительно «круче» растет и убывает, быстрее приближается к своим пределам. Для решения задачи идентификации технического состояния РТС целесообразно использовать функцию активации нейронов сети логистического (сигмоидального) вида (1). Таким образом, для идентификации технического состояния РТС конкретного типа обоснован выбор многослойной нейронной сети прямого распространения, включающей три скрытых слоя. Количество нейронов входного слоя определяется количеством контролируемых параметров основных систем РТС конкретного типа, а выходного – количеством возможных классов технического состояния РТС. Элементарные преобразователи данной сети имеют функцию активации сигмоидального вида. На втором этапе необходимо предварительно обработать результаты измерений контролируемых параметров технического состояния основных систем РТС. Контролируемые параметры технического состояния РТС могут иметь различные единицы измерения, поэтому, чтобы над ними можно было производить арифметические, логические действия, их необходимо нормировать, переходя к безразмерным величинам. Приведение данных к единичному масштабу [0,1] в соответствии с выбранным видом функции активации (1) обеспечивается нормировкой каждого значения входных переменных на диапазон разброса их значений. В простейшем варианте это линейное преобразование в единичный отрезок
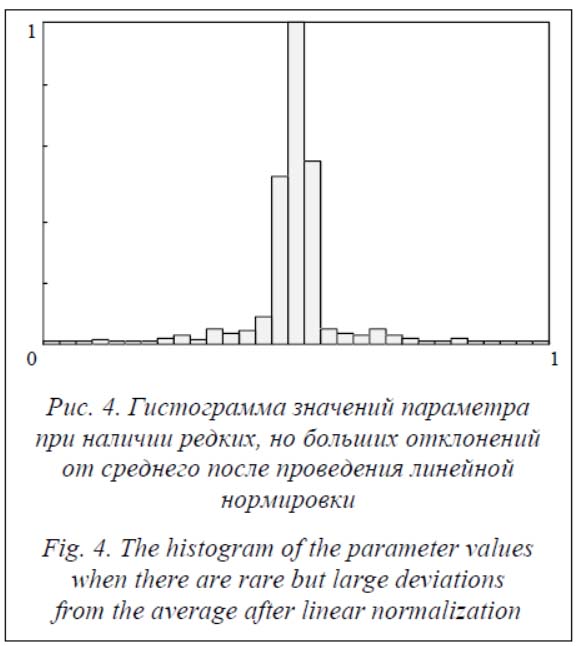
где Линейная нормировка оптимальна, когда значения переменной xi плотно заполняют определенный интервал. Если в данных имеются относительно редкие выбросы, намного превышающие типичный разброс, именно эти выбросы определят масштаб нормировки. Это приведет к тому, что основная масса значений нормированной переменной
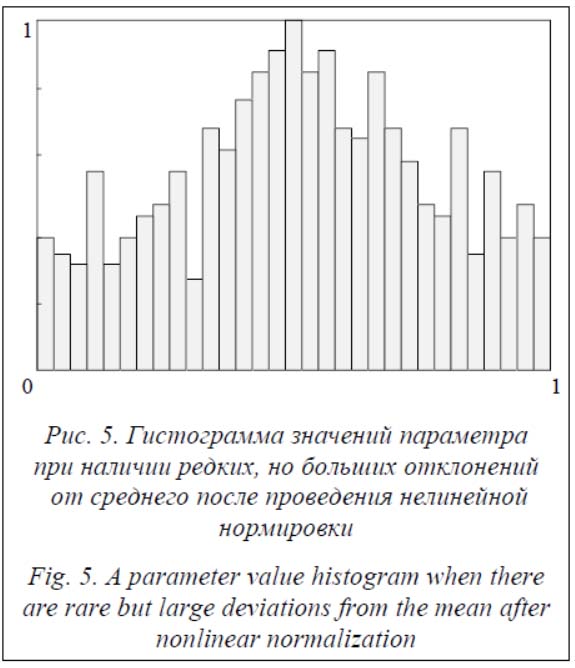
Как видно из рисунка 5, распределение значений после такого нелинейного преобразования гораздо ближе к равномерному. Преобразование
где На третьем этапе необходимо осуществить обучение искусственной нейронной сети. Для решения задачи идентификации технического состояния РТС нейронная сеть должна быть обучена. Одним из способов улучшения качества идентификации является выбор наиболее подходящего алгоритма обучения нейронной сети. Большинство опубликованных научных исследований опираются на наиболее известный алгоритм обучения нейронных сетей – алгоритм градиентного спуска с обратным распространением ошибки [9, 10]. Однако в работе [11] убедительно доказано, что этот достаточно универсальный алгоритм не обеспечивает наилучшей сходимости, требует достаточно много времени для обучения нейросети, а также эмпирического или алгоритмического определения оптимальной скорости обучения, которая значительно влияет на результативность алгоритма. В силу популярности данного алгоритма многочисленные исследования были направлены на его улучшение, что привело к появлению эвристик [12], улучшающих этот алгоритм. Наиболее известные эвристики, такие как «момент», «изменяемая скорость обучения» или «стохастическое обучение», приводят к небольшим улучшениям, реализующимся при решении определенных классов задач. Значительное улучшение результативности может быть достигнуто применением алгоритмов второго порядка, таких как алгоритмы Ньютона, алгоритм сопряженных градиентов или алгоритм Левенберга–Марквардта. Считается, что алгоритм Левенберга–Марквардта позволяет достигать наименьшей ошибки нейронной сети, причем нередко с наименьшими временными затратами [7, 10]. Алгоритм обеспечивает приемлемый компромисс между скоростью сходимости, присущей алгоритмам Ньютона, и стабильностью, свойственной алгоритму градиентного спуска [10, 12]. Обучение нейронной сети предполагает наличие обучающих образов, называемых обучающей последовательностью. При этом для каждого входного образа вычисляют реакцию сети и сравнивают с соответствующим целевым образом, их разница представляет собой невязку (ошибку рассогласования), которую сравнивают с заданной точностью. Если невязка превышает ее, то корректируют весовые коэффициенты нейронной сети, если невязка находится в допустимых пределах, обучение останавливают. Алгоритм Левенберга–Марквардта является одним из приложений стратегии оптимизации Ньютона. Основным выражением методов Ньютона является pk = – [H(wk)]–1 g(wk), где pk – направление, гарантирующее достижение минимального для данного шага значения целевой функции; g(wk) – значение градиента в точке последнего решения wk; H(wk) – значение матрицы Гессе в точке последнего решения wk. Одной из особенностей алгоритма Левенберга–Марквардта является его чувствительность к локальным минимумам (как, впрочем, и всех алгоритмов локального поиска). Алгоритм Левенберга–Марквардта изменяет весовые коэффициенты нейронной сети, используя квадратичную аппроксимацию поверхности ошибки. Данная аппроксимация помогает найти минимум достаточно быстро, но, с другой стороны, она увеличивает опасность нахождения локального экстремума на поверхности ошибки обучения. Для решения этой проблемы предлагается использовать эвристический подход для поискового процесса в локальных минимумах. Оригинальный алгоритм Левенберга–Марквардта не позволяет совершать шаги, увеличивающие среднюю ошибку нейронной сети [12]. Предлагаемый эвристический подход заставляет алгоритм совершать «рискованные» шаги по по- верхности ошибки в случайном направлении с нарастающей величиной шага, пытаясь таким образом выскочить из локального минимума, чтобы затем продолжить продвижение к новому минимуму, используя правила оригинального алгоритма. После нескольких неудачных попыток в данной работе предлагается использовать шесть попыток, найденный минимум признается наименьшим и алгоритм завершает свою работу. Для описания эвристической модификации алгоритма Левенберга–Марквардта представим целевую функцию в следующем виде, где Е – локальная целевая функция (в общем случае среднеквадратическая ошибка обучения, вычисленная в выходном слое нейронной сети как половина суммы разностей желаемых и действительных выходов элементов выходного слоя, возведенных в квадрат):
epm(wij) = dpm – opm(wij), где dpm – учебный (идеальный) выход нейронной сети; opm – выход нейронной сети; m – количество выходов, В ходе реализации алгоритма Левенберга–Марквардта (в частности, при вычислении функции E) не осуществляется вычисление матрицы Гессе (матрицы вторых частных производных целевой функции по wij), требующее больших объемов вычислительных ресурсов для обучения сети:
Вычисляется матрица, аппроксимирующая матрицу Гессе: H(wij) » JT(wij)J(wij) + m I(wij), (3) где J(wij) – якобиан (матрица первых производных целевой функции по wij); JT(wij) – транспонированная матрица Якоби; m – параметр Левенберга–Марквардта, является скалярной величиной, изменяющейся в процессе оптими- зации; I(wij) – диагональная матрица из элемен- тов главной диагонали произведения матриц (JT(wij) J(wij)). Матрица Якоби имеет вид
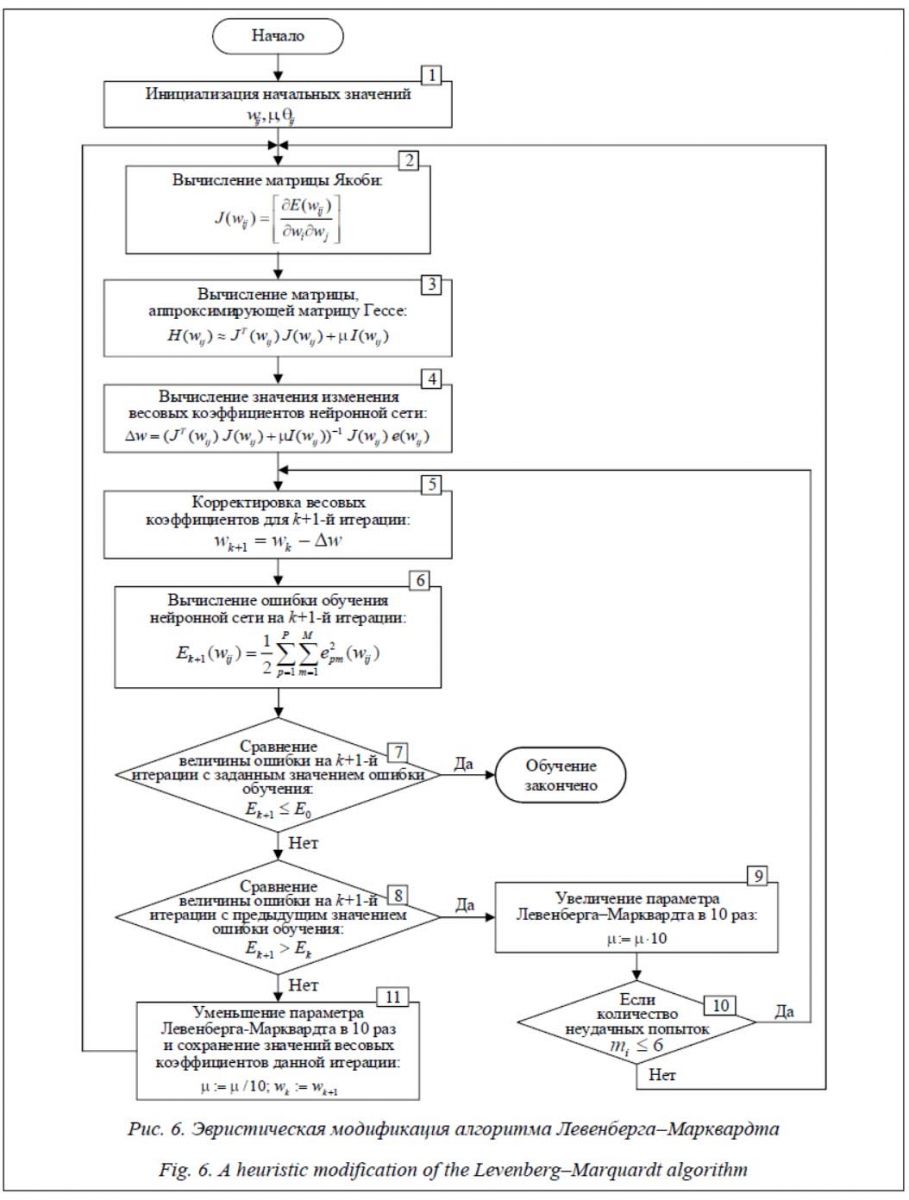
При использовании данных обозначений шаги эвристически модифицированного алгоритма Левенберга–Марквардта для обучения искусственной нейронной сети будут следующими. Шаг 1. Инициализировать начальные значения пороговых величин qij, параметра Левенберга–Марквардта µ и весовых коэффициентов нейронной сети wij случайными числами. Шаг 2. Вычислить матрицу Якоби по формуле (4). Шаг 3. Вычислить матрицу, аппроксимирующую матрицу Гессе, по формуле (3). Шаг 4. Определить значение изменения весовых коэффициентов нейронной сети по выражению Dw = (JT(wij)J(wij) + m I(wij))–1 J(wij) e(wij). Шаг 5. Скорректировать весовые коэффициенты нейронной сети для k + 1-й итерации: Wk+1 = wk – Dw. Шаг 6. Вычислить ошибку обучения нейронной сети на k + 1-й итерации по выраже- нию (2). Шаг 7. Сравнить величину ошибки на итерации k + 1 с заданным значением ошибки обучения нейронной сети E0. При выполнении условия Ek+1 £ E0 обучение нейронной сети заканчивается. Если условие не выполнено, необходимо перейти к следующему шагу алгоритма. Шаг 8. Сравнить величину ошибки на итерации k + 1 с предыдущим значением ошибки обучения нейронной сети. Если ошибка выросла по отношению к предыдущей итерации, Ek+1 > Ek, то необходимо перейти к следующему шагу алгоритма, если нет, то переход к шагу 11. Шаг 9. Увеличить параметр Левенберга–Марквардта в 10 раз (µ: = µ·10). Шаг 10. Оценить количество неудачных попыток выхода из области локального минимума ошибки обучения нейронной сети mi £ 6. Если данное условие выполняется, необходимо перейти к шагу 5. При невыполнении условия переход к шагу 2. Шаг 11. Уменьшить параметр Левенберга–Марквардта в 10 раз (µ: = µ/10) и сохранить значения весовых коэффициентов нейронной сети на данной итерации wk: = wk+1. Далее перейти к шагу 2.
Практический эксперимент В ходе проведения исследования оценивалось техническое состояние двух однотипных РТС на основании мониторинга показаний 8 датчиков, установленных на основных системах РТС, оказывающих непосредственное влияние на их техническое состояние. Исходная выборка включала 3 800 наблюдений, при этом объем контрольной выборки составил 15 %. Достоверность оценки технического состоя- ния РТС составила 93 %. Можно сделать вы- вод [13], что при увеличении накопленной фактографической информации по обучающим прецедентам эксплуатации однотипных РТС достоверность идентификации технического состояния РТС возрастет. Заключение Результаты эксперимента показывают, что предложенный метод, основанный на прецедентных принципах машинного обучения искусственных нейронных сетей, позволяет в реальном масштабе времени решать задачу идентификации текущих классов технического состояния РТС военного назначения на основе результатов измерений контролируемых параметров основных систем РТС. Реализация данного метода в виде специального ПО позволит создать комплексные системы мониторинга технического состояния РТС военного назначения [14], построенные на универсальных принципах и обеспечивающие высокий уровень достоверности идентификации технического состояния изделий. Литература 1. Допира Р.В., Щербинко А.В., Брежнев Д.Ю., Щербинко Т.А. Методический подход к построению диагностической модели поиска отказов сложной технической системы при организации восстановления ее работоспособности // Ремонт. Восстановление. Модернизация. 2017. № 8. С. 23–25. 2. Бабокин Г.И., Шпрехер Д.М. Контроль технического состояния электромеханических систем при помощи нейросетевых схем распознавания // Изв. ТулГУ. 2010. № 1. С. 109–114. 3. Допира Р.В., Маслов Ф.Д., Королев В.В., Шароглазов В.Б. Метод акустической диагностики вращающихся частей антенно-фидерных устройств с применением самообучающейся нейросети // T-Comm: Телекоммуникации и транспорт. 2017. Т. 11. № 10. С. 45–50. 4. Kiselev M.I., Pronyakin V.I. and Tulekbaeva A.K. Technical diagnostics functioning machines and Mechanisms. IOP Conf. Ser., MSE, 2018, vol. 312. DOI: 10.1088/1757-899X/312/1/012012. 5. Генов А.А., Русаков К.Д., Хиль С.Ш. Идентификация состояния сложной технической системы в условиях неопределенности измерительной информации // Программные продукты и системы. 2017. Т. 30. № 3. С. 373–377. DOI: 10.15827/0236-235X.119.373-377. 6. Русаков К.Д., Хиль С.Ш. О задаче выбора признаков наблюдаемого состояния сложного динамического объекта в условиях различного качества измерительной информации // Нейрокомпьютеры и их применение: тез. докл. XV Всерос. науч. конф. М.: Изд-во МГППУ, 2017. С. 246–248. 7. Хайкин С. Нейронные сети: полный курс; [пер. с англ. Н.Н. Куссуль, А.Ю. Шелестова]. М.: Вильямс, 2006. 1104 с. 8. Пекунов В.В. Извлечение информации из нейронных сетей прямого распространения в виде простых алгебраических моделей // Информационные технологии. 2017. Т. 23. № 1. С. 76–80. 9. Rumelhart D.E., Hinton G.E., Williams R.J. Learning internal representations by error propagation, in parallel distributed processing. MIT Press, 2011, vol. 1, pp. 318–362. 10. Воронина В.В., Михеев А.В., Ярушкина Н.Г., Святов К.В. Теория и практика машинного обучения. Ульяновск: Изд-во УлГТУ, 2017. 290 с. 11. Samad T. Back-propagation improvements based on heuristic arguments. Proc. IJCNN, Washington, USA, 1990, vol. 1, pp. 565–568. 12. Махотило К.В., Вороненко Д.И. Модификация алгоритма Левенберга–Марквардта для повышения точности прогностических моделей связного потребления энергоресурсов в быту // Вісн. НТУ «ХПІ». 2005. № 56. С. 83–90 (на рус.). 13. Жуков Д.А., Клячкин В.Н. Влияние объема контрольной выборки на качество диагностики состояния технического объекта // Автоматизация процессов управления. 2018. № 2. С. 90–95. 14. Ягольников Д.В., Допира Р.В., Шведун А.А. Интеллектуальная система информационной поддержки принятия решений при управлении технической эксплуатацией систем вооружения радиотехнических войск // Военная мысль. 2019. № 3. С. 13–19. References
|
 .
.
| Permanent link: http://swsys.ru/index.php?page=article&id=4650&lang=&lang=en&like=1 |
Print version Full issue in PDF (4.91Mb) |
| The article was published in issue no. № 4, 2019 [ pp. 628-638 ] |
Perhaps, you might be interested in the following articles of similar topics:
- Конструктивный метод обучения искусственных нейронных сетей со взвешенными коэффициентами
- Разработка модели имитации значений технологических параметров гидроагрегата для тренажера оперативного персонала
- Применение искусственных нейронных сетей в системах автоматического управления магнитной левитацией
- Моделирование размещения сервис-ориентированных приложений в программно-управляемой инфраструктуре виртуального центра обработки данных
- Моделирование поведения интеллектуальных агентов на основе методов машинного обучения в моделях конкуренции
Back to the list of articles