Journal influence
Bookmark
Next issue
Software system for research of stability of nonlinear dynamical systems
The article was published in issue no. № 1, 2012 [ pp. 14 - 18 ]Abstract:The complex of programs for research stability of autonomic nonlinear dynamic systems without Lapunov's functions using is represented. The structure of complex and main features of complex realization on PC is presented. Structures of algorithms for few calculating modules of complex are represented.
Аннотация:Представлен комплекс программ для исследования устойчивости автономных нелинейных динамических систем без использования функций Ляпунова. Описаны его структура и основные особенности реализации на ПЭВМ. При-ведены структуры алгоритмов основных вычислительных модулей комплекса.
| Author: (ferus.tigris@gmail.com) - | |
| Keywords: distributed systems, bifurcation, stability, nonlinear, dynamic system modeling |
|
| Page views: 10152 |
Print version Full issue in PDF (5.33Mb) Download the cover in PDF (1.08Мб) |
Результаты основополагающих работ по исследованию сложных динамических систем, описываемых нелинейными системами дифференциальных уравнений, получены на основе введения и анализа функций Ляпунова, то есть качественными методами. Однако общего алгоритма построения функции Ляпунова нет [1], эвристические приемы реализуются в частных случаях, так что, универсальный программируемый алгоритм исследования устойчивости нелинейных динамических систем пока не создан. В данной статье представлен комплекс программ, реализующий алгоритм исследования нелинейных автономных динамических систем, основанный на разработанном универсальном методе исследования автономных нелинейных динамических систем без использования функций Ляпунова [2–4].
– исследования динамической устойчивости решения автономных нелинейных систем обыкновенных дифференциальных уравнений вида
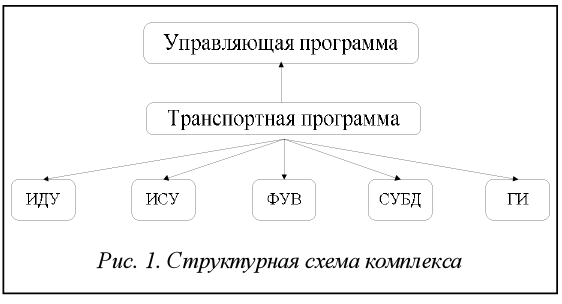
где – исследования структурной устойчивости нелинейных автономных динамических систем и построения их бифуркационных множеств; – прогнозирования поведения динамических систем с целью построения функций, сохраняющих устойчивость этих систем. Программы комплекса могут выполняться в автоматическом и интерактивном режимах. Структура и особенности реализации программного комплекса Комплекс имеет модульную структуру (рис. 1) и состоит из следующих независимых модулей: управляющий модуль, СУБД, транспортный модуль, модуль исследования динамической устойчивости (ИДУ), модуль исследования структурной устойчивости (ИСУ), модуль формирования управляющих воздействий (ФУВ), модуль графического пользовательского интерфейса (ГИ). Модули комплекса взаимодействуют между собой по сети через транспортную программу. Транспортная программа и протокол передаваемых через нее сообщений образуют транспортную систему, являющуюся надстройкой над стеком протоколов TCP/IP с дополнительной системой авторизации и шифрования и реализованную на прикладном уровне модели OSI (ГОСТ Р ИСО 7498-2-99).
Процесс работы комплекса организует управляющий модуль, координирующий запуск, завершение и взаимодействие других модулей. Управляющие модули могут подключаться друг к другу (рис. 3), образуя древовидные структуры для одновременного исследования независимых или последовательно соединенных динамических систем. Вычислительные модули могут подключаться динамически «в горячем режиме», не прерывая работу всего комплекса и других модулей. Путем динамического подключения вычислительных модулей и других комплексов осуществляется масштабируемость. Так как комплекс является распределенной системой, то его масштабируемость не ограничена. В комплексе используется нереляционная БД, обладающая высоким быстродействием и расширяемостью. Данные в ней представлены структурой ключ-значение для быстрого и легкого доступа к ним. Такая структура СУБД, в отличие от традиционных SQL-решений, не ограничивает быстродействие комплекса и его масштабируемость.
После ввода исходных данных оператор дает команду начать расчет, который может быть прерван по запросу оператора. После окончания расчета оператору выводится сообщение «КАТАСТРОФЫ», если динамическая система имеет катастрофы; «НЕУСТОЙЧИВА», если исследуемая система неустойчива, и сообщение «УСТОЙЧИВА» в обратном случае. Если система неустойчива динамически, оператор может просмотреть области фазового пространства, в которых проявляется неустойчивость. Если система неустойчива структурно, оператор может просмотреть области пространства управляющих параметров, в которых система имеет катастрофы. Оператор имеет возможность просмотреть графики функций управления, сохраняющих систему в устойчивом состоянии и построенных модулем ФУВ. Все модули комплекса разработаны на высокоуровневом императивном языке C++ и высокоуровневом функциональном языке lisp с использованием библиотек Qt версии 4.6. В вычислительных модулях комплекса задействована система символьной математики Maxima версии 5.0. Модуль ИДУ На входе модуль получает исходное диффе-ренциальное уравнение (1) в символьном представлении, вектор управляющих параметров На выходе модуль выдает область U устойчивости исходной динамической системы (1) в пространстве фазовых координат. Алгоритм преобразования входных данных в выходные [2] следующий. 1. Регистрация в транспортной системе. 2. Получение исходных данных из БД. 3. Построение сопряженной гамильтоновой системы уравнений по отношению к системе (1):
4. Построение характеристического уравнения сопряженной системы:
где
…,
5. Построение из коэффициентов-функций характеристического уравнения системы (2) функциональных миноров Гурвица:
6. Выявление методом градиентного спуска такой области U в пространстве фазовых координат, в которой функциональные миноры Гурвица (4) отрицательны. 7. Запись выявленной области U в БД. Модуль ИСУ На входе модуль получает исходное дифференциальное уравнение (1) в символьном представлении и требуемую точность. На выходе модуль выдает бифуркационное множество R исходной динамической системы (1) в пространстве управляющих параметров. Алгоритм преобразования входных данных в выходные [4] выглядит следующим образом. 1. Регистрация в транспортной системе. 2. Получение исходных данных из БД. 3. Построение сопряженной гамильтоновой системы уравнений (2) по отношению к систе- ме (1). 4. Построение характеристического уравнения (3) сопряженной системы. 5. Построение из коэффициентов-функций характеристического уравнения системы (2) функциональных миноров Гурвица (4). 6. Выявление такой области R в пространстве управляющих параметров, где каждая точка является границей между областями, в одной из которых все функциональные миноры (4) положительны, а в другой нет. 7. Запись выявленной области R в БД. На основании изложенного можно сделать следующие выводы. Комплекс является распределенной масштабируемой вычислительной системой с собственными механизмами хранения и обработки данных. База вычислительных модулей комплекса использует мощный математический аппарат и реализует уникальные алгоритмы исследования динамических систем и процессов. Предусмотрена возможность быстрого динамического наращивания базы вычислительных модулей комплекса. Разработанный комплекс программ обеспечивает исследование задач проектирования сложных динамических систем и процессов с нелинейными элементами. Литература 1. Матросов В.М. Метод векторных функций Ляпунова: анализ динамических свойств нелинейных систем. М.: Наука, 2001. 2. Катулев А.Н., Кузнецов А.Ю. Алгоритм исследования устойчивости решений нелинейных автономных систем дифференциальных уравнений // Нелинейный мир. 2010. № 10. Т. 8. С. 616–620. 3. Кудинов А.Н., Катулев А.Н., Кузнецов А.Ю. Исследование устойчивости автономных нелинейных динамических систем // Динамические и технологические проблемы механики конструкций и сплошных сред: матер. XVI Междунар. симпоз. им. А.Г. Горшкова. М.: МАИ, 2010. Т. 1. С. 110–112. 4. Катулев А.Н., Кузнецов А.Ю. Исследование устойчивости автономных нелинейных динамических систем // Труды МАИ: электрон. журн. 2010. № 40. URL: www.mai.ru/science/trudy/. |
 , (1)
, (1) – вектор фазовых координат,
– вектор фазовых координат,  ;
;  – вектор управляющих параметров;
– вектор управляющих параметров;  – нелинейная вектор-функция;
– нелинейная вектор-функция;
 Интерактивное взаимодействие с оператором осуществляется через модуль графического пользовательского интерфейса. Для ввода исходных данных – размерности фазового пространства, размерности пространства управляющих параметров, нелинейной системы дифференциальных уравнений, описывающей исследуемую систему, – используется форма ввода исходных данных. Дифференциальные уравнения вводятся в символьной мнемонической форме.
Интерактивное взаимодействие с оператором осуществляется через модуль графического пользовательского интерфейса. Для ввода исходных данных – размерности фазового пространства, размерности пространства управляющих параметров, нелинейной системы дифференциальных уравнений, описывающей исследуемую систему, – используется форма ввода исходных данных. Дифференциальные уравнения вводятся в символьной мнемонической форме. и требуемую точность.
и требуемую точность. , . (2)
, . (2)
 , (3)
, (3) ,
, ,
, – суммы главных миноров n-го порядка матрицы сопряженной к (1) системы
– суммы главных миноров n-го порядка матрицы сопряженной к (1) системы  .
. ,
, ,
, . (4)
. (4)| Permanent link: http://swsys.ru/index.php?page=article&id=3003&lang=en |
Print version Full issue in PDF (5.33Mb) Download the cover in PDF (1.08Мб) |
| The article was published in issue no. № 1, 2012 [ pp. 14 - 18 ] |
Perhaps, you might be interested in the following articles of similar topics:
- Математическая модель контролируемого выполнения
- Система нахождения релейного программного управления для динамических объектов
- Программное обеспечение акустооптических процессоров
- Web 2.0 среда моделирования динамических систем
- Алгоритм и программная реализация синтеза модели объекта испытаний на основе решения уравнения непараметрической идентификации
Back to the list of articles